安価な3次元形状計測センサ利用による作物群落構造解析システム
要約
3次元形状計測センサ、Kinectを使用して開発した作物群落構造解析システムは、葉面積を連続・非破壊的に測定することができる。また、葉面積の階層分布を推定することで品種特性の把握にも利用可能である。
- キーワード:Kinect、群落構造、葉面積、階層分布、非破壊計測
- 担当:日本型施設園芸・施設野菜生産
- 代表連絡先:電話029-838-8681
- 研究所名:野菜茶業研究所 野菜生産技術研究領域
- 分類:研究成果情報
背景・ねらい
施設果菜類において作物の群落構造(葉面積や受光体勢)、生育速度や草勢など栽培期間を通して適切な範囲に維持することが必須であり、これらの情報をリアルタイムに把握することは極めて有効である。これまで、群落構造の解析には、例えば葉面積スキャナで個葉面積を測定する方法などが開発されてきたが、栽培現場への導入は容易ではなかった。そこで本研究では、高性能化、低価格化が進む3次元形状計測センサを用いて、非破壊で連続的に3次元情報を計測できるセンシングシステムを開発する。計測データから葉面積、受光態勢、茎伸長速度等、環境制御にフィードバック可能な指標を開発する。
成果の内容・特徴
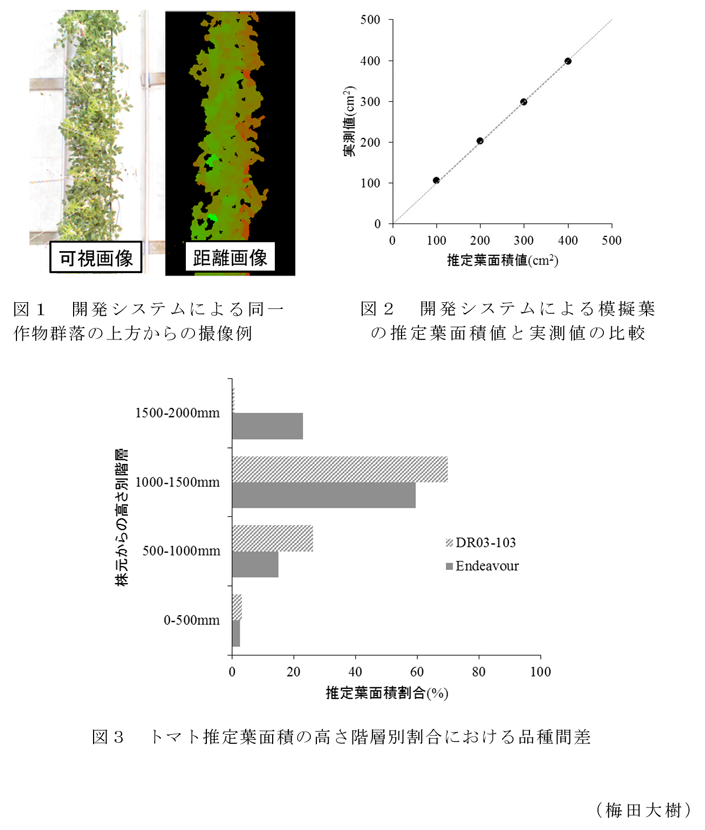
- 群落構造解析システムは、3次元形状計測センサであるKinect for Windows v1(Microsoft)、計測用ソフトウェア、及び計測用PCから構成されている。計測用ソフトウェアでは、Kinectセンサから画素ごとに出力される可視光、赤外光、及び距離情報を持つ画像を得ることができる(図1)。距離画像は、出力された距離情報を利用して測定対象物の高さ情報を画素ごとに色の濃淡で表現できる。
- Kinectセンサは作物群落の上方から真下に向けて設置する。距離画像を得るため赤外光を使用するため、外乱光の少ない夜間に測定することが望ましい。
- 模擬葉を上方から測定した場合の葉面積の推定値と、実際に測定して算出した面積の実測値との比較結果を図2に示す。図中の推定葉面積値はKinectセンサから得られた距離情報を用いて算出し、更に実測値との間に生じる系統的誤差を修正するため補正係数をかけた値となっている。結果より、実測値に対する推定誤差は0.02であった。
- 栽培中の作物群落に対して葉面積推定を行い、高さ階層別の推定葉面積値の作物群落全体の葉面積に対する比を算出することで、群落構造を推定することが出来る(図3)。例えば、日本品種に対して高収量であるオランダ品種「Endeavour」と日本品種「DR03-103」について、群落構造を推定すると、オランダ品種の草勢が強い特徴が良く表されている。このように、葉群の階層分布に関する品種特性の把握を行うことができる。
成果の活用面・留意点
- 本システムは、生育中の作物群落の葉面積や受光態勢の適否についての連続・非破壊診断および環境制御の指標として活用できる。
具体的データ
その他
- 中課題名:高生産性と低環境負荷を両立させる施設野菜生産技術の体系化
- 中課題整理番号:141a0
- 予算区分:委託プロ(再エネ)
- 研究期間:2013~2015年度
- 研究担当者:梅田大樹、岩﨑泰永、黒崎秀仁
- 発表論文等:
1)植物群落構造解析システム 特願2014-180380
2)植物栽培用の環境制御システム 特願2014-180379