旋回動作が不要なスイッチバック式電動クローラ運搬車
※アーカイブの成果情報は、発表されてから年数が経っており、情報が古くなっております。
同一分野の研究については、なるべく新しい情報を検索ください。
要約
運転操作部の移設により、前後進方向の区別なく利用できる電動クローラ運搬車である。同運搬車は、旋回動作を行うことなく逆方向へ走行できるため、旋回スペースが確保できない通路においても往復運転による運搬作業を行うことができる。
- キーワード:カンキツ、走行通路、旋回、スイッチバック、電動クローラ運搬車
- 担当:近中四農研・次世代カンキツ生産技術研究チーム
- 連絡先:電話0877-62-0800
- 区分:近畿中国四国農業・農業環境工学
- 分類:技術・参考
背景・ねらい
傾斜地カンキツ園におけるクローラ運搬車は、カンキツ作の中でも労働負担の大きい各種運搬作業を軽労化できる機械として広く利用
されている。一般に、傾斜地園内において運搬車を使用する際には、走行通路末端に直径2m程度の旋回空間を設けるが、収穫果実の運搬作業では走行通路途中
での折り返し往復走行となる。ところが、実際には通路付近にコンテナや脚立など障害物があることが多く、運搬車を任意の場所で旋回させることができず、折
り返し可能な地点まで余分に走行したり、後方に注意しながらやむを得ず後退走行するなど、非効率な利用場面が多い。また、近年増加しているマルチ栽培で
は、運搬車の旋回によってマルチを損傷する場合がある。
そこで、このような傾斜地果樹園での運搬車利用上のネックとなっている旋回動作が不要で、狭い走行空間においても利用できる運搬車を開発する。
成果の内容・特徴
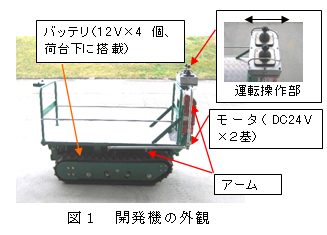
- 本機は、DCモータで駆動する電動クローラ運搬車であり、20kg入りコンテナを6ケース積載できる。バッテリや制御機器は荷台下に収納されているため、機体上面が全て荷台として使え、前後進方向の区別なく利用できる(図1)。
- 本機は荷台端に備えた運転操作部により前後進を操作する。本操作部は荷台中央にアームを介して接続されているので、機体の逆 端へ移設することによって迅速に進行方向を切り替えることができる。このため、既存のクローラ運搬車のように車体を切り返して旋回動作を行う必要がない(図2)。
- 左右のクローラの回転方向は、それぞれのレバーの前後操作と対応しており、運転操作部を機体の逆端に移設しても、その関係は変わらない(図1)。このためリモコン操作のように、レバーの操作方向と機体進行方向が逆になるという誤操作の危険がなく、直観的操作が可能である。
- 本機を用いた運搬作業では、作業通路上の任意の位置で往復運転が可能となるため、既存の運搬車のように、旋回可能な地点までの空走や通路末端での後退など非効率な走行を行う必要がなくなり、運搬時の安全性および作業能率の向上に有効である(図3)。また、旋回スペースが設置できず、これまで運搬車の利用が困難であったところでも幅1m程度の走行通路を確保すれば利用できる。
成果の活用面・留意点
- 空間が狭く、旋回スペースが確保できない園地における運搬車の要素技術として有効である。
- 1充電走行距離は約6000mである(120kg積載で、傾斜4°のコンクリート路面50m区間を往復走行し、完全停止するまでの距離)。このとき、満充電に回復するまでの充電時間は約14.5時間である。
具体的データ

その他
- 研究課題名:次世代型マルドリ方式を基軸とするかんきつ等の省力・高品質安定生産技術の確立
- 課題ID:213-f
- 予算区分:交付金プロ(カンキツ連年生産)
- 研究期間:2003-2007年度
- 研究担当者:田中宏明、中元陽一、角川 修、大黒正道、畔柳武司、福本 一(福本ボデー)