畝立て・施肥・マルチの同時作業を対象とした速度連動施肥制御システム
※アーカイブの成果情報は、発表されてから年数が経っており、情報が古くなっております。
同一分野の研究については、なるべく新しい情報を検索ください。
要約
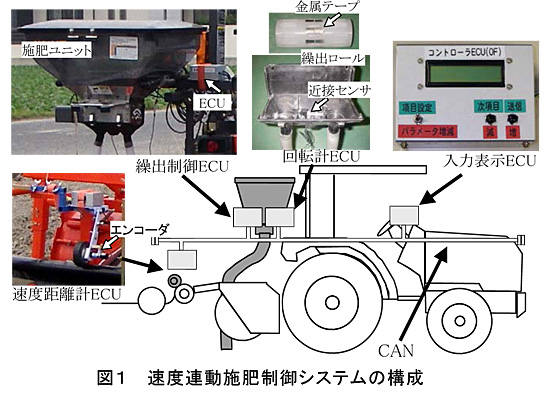
本システムはCAN(Controller Area Network)上の速度距離計ECU(電子制御ユニット)、繰出制御ECU、繰出ロール回転計ECU、入力表示ECUで構成され、畝立て、施肥、マルチを1工程で行う作業機に搭載し、走行速度に連動して肥料を繰出す制御システムである。
- キーワード:繰出制御、施肥、速度連動、マルチ、CAN
- 担当:近中四農研・環境保全型野菜研究チーム
- 代表連絡先:電話084-923-4100
- 区分:近畿中国四国農業・農業環境工学、共通基盤・作業技術
- 分類:技術・参考
背景・ねらい
近年の肥料価格の高騰対策や農業の環境負荷低減が求められている中では、必要とされる肥料を無駄なく精度良く施用することが求められている。精度の高い施肥機でも肥料毎に十分なキャリブレーションを行い、肥料の種類や圃場条件や走行速度の違いにより設定を変えなければ能力を十分発揮できない。しかし、現実には作業が繁雑なため設定変更が適切に行われていない場合がみられる。拡張性の高い分散計測制御を行えるCANを利用し、簡易な入力方法で高精度の繰出制御が可能な電子制御機器を開発する。
成果の内容・特徴
- 本システムはマルチを引き出す速度を計測し、速度に応じ施肥機を駆動するDCモータへ供給する電圧を制御して肥料の散布制御を行う。また、CANを用い分散型の計測・制御を行うため、施肥ユニットの追加や個々のECUの改良・更新が容易である。
- 本システムは速度や走行距離を測定する速度距離計ECU、速度情報と設定されたパラメータによりモータへの出力電圧を制御する繰出制御ECU、繰出ロールの回転速度を計測する回転計ECUと、速度の表示や施肥量等のパラメータを入力する入力表示ECUで構成される(図1)。また、走行速度や繰出ロールの回転速度の情報、施肥量等のパラメータのECU間の通信にCANを用いる。
- 速度距離計ECUはマルチに接したゴム製の転動輪の回転数をエンコーダで計測し、距離および速度に変換して0.1秒間隔で送信しており、トラクタのスリップの影響を受けない。
- 繰出制御ECUに必要なパラメータは、表1の7項目であり、入力表示ECUより設定できる。これらは、最新値が繰出制御ECUに記録されるため、事前の繰出試験で同定したパラメータを入力しておき、必要な項目のみ更新する。
- トラクタ直装型で畝立て・畝内施肥・マルチの同時作業を行う作業機に搭載し粒状の化学肥料を施用したところ、速度距離計の誤差は1%以内と小さく、施用量の誤差も4%以内であり(表2)、走行開始や停止の際に走行速度情報に対して応答の早い繰出制御ができた(図2)。
成果の活用面・留意点
- 作業中の速度情報や肥料の繰出ロールの回転速度の情報は、入力表示ECUに表示させることができ、オペレータが動作を確認できる。さらに、CANバスに対応したデータロガーやパソコンを接続すると、これらの作業情報を記録することができる。
- パソコンから仮の速度情報を一定間隔で送信することにより、パラメータ決定のための繰出試験を精度良く行うことができる。
- ECUの動作用にはモータ駆動用の電源と絶縁された12V電源が必要である。
- 散布可能な肥料の種類および散布精度は接続する施肥ユニットの性能に準じる。
具体的データ
その他
- 研究課題名:高精度施用機構によるペレット有機物の局所施用技術の開発
- 課題ID:214-u
- 予算区分:基盤
- 研究期間:2006~2008年度
- 研究担当者:奥野林太郎、窪田潤、亀井雅浩、池田順一