ISO11783に準じた通信フォーマットで作業機を操作できる共通リモートコントローラ
要約
農用車両通信規格ISO11783の通信フォーマットを用い、作業機ECU(電子制御装置)から、作業機制御用の数値入力項目とその通信様式などの設定情報を送ることで、異なる作業機の操作や情報表示ができる簡易で汎用的な共通リモートコントローラである。
- キーワード:ISO11783、共通リモートコントローラ、通信規格、作業機ECU
- 担当:IT高度生産システム・農作業ロボット体系
- 代表連絡先:電話 084-923-4100
- 研究所名:近畿中国四国農業研究センター・営農・環境研究領域
- 分類:研究成果情報
背景・ねらい
農用車両内の通信の国際規格ISO11783に対応する機器が大型機械を中心に国内外で普及しつつある。農業機械の電子化は、農薬、肥料など資材利用の適性化、作業情報記録の簡易化など資するところは大きい。ISO11783で作業機を操作するため仮想端末(VT)が定義されているが、高機能、高価格で、小型機械や比較的単純な作業機においては過剰装備となる。ISO11783規格対応トラクタのネットワークを利用し、作業機に専用または汎用に利用できる簡易な共通リモートコントローラ向けの規格が中小規模圃場で使用する農作業機械の高機能化に向けて重要である。このような共通リモートコントローラの標準化に向けて仕様および機器の提示を行う。
成果の内容・特徴
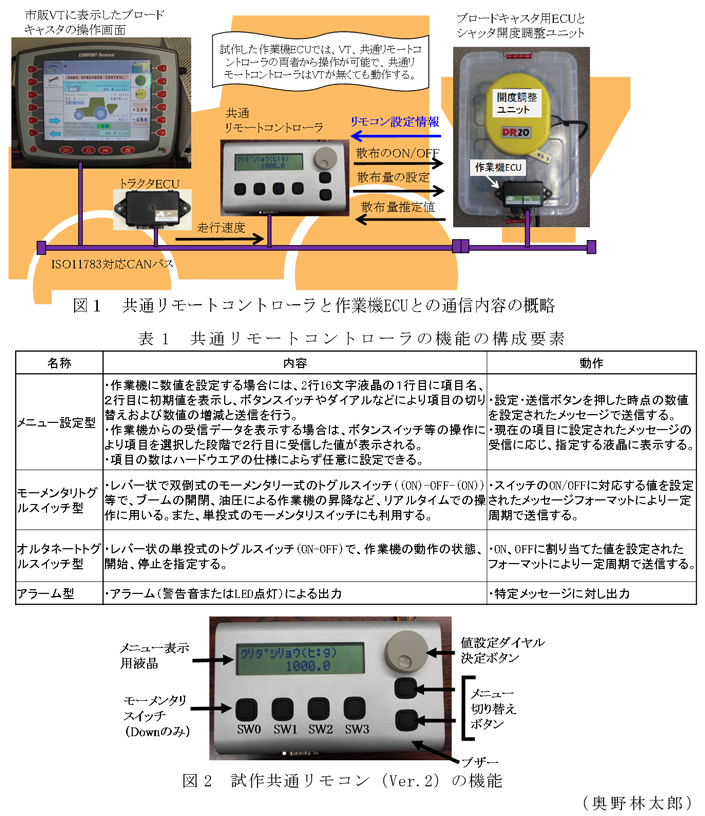
- 共通リモートコントローラは、複数作業機への同時接続を考慮せず、操作機能を限定することにより、VTに対し大幅に機能を簡易化した入力、表示装置であり、ISO11783に準じた車両内ネットワークに接続して使用する(図1)。
- 共通リモートコントローラの機能の要素は、作業機操作と作業機からの情報表示に必要となるメニュー設定型、モーメンタリトグルスイッチ型、オルタネートトグルスイッチ型、アラーム型の4種類の機能で構成し(表1)、さらなる簡易化ができるようスイッチの数についてはリモコン側のハードウエア仕様として共通には定義しない。
- 作業機制御で使用するメニューやスイッチなどの個数および液晶表示内容、スイッチや数値入力時に送られるべき通信情報の仕様は、作業機ECUから、車両内ネットワークを通じて共通リモートコントローラに転送する。
- 共通リモートコントローラの設定情報に初期値を認めることで、本仕様を個別の作業機に対する専用のリモートコントローラとして利用することも可能である。
- 試作した共通リモートコントローラは、4つのボタンと警告用のブザーを持ち、16桁×2行のキャラクタ液晶に2段に表示される項目と数値を上下2つのボタンで切り替え、ダイヤルの回転で入力値を設定し、ダイヤルの押下により送信を行う(図2)。
- 本機に対応するブロードキャスター用、播種機用の作業機ECUを開発している。共通リモートコントローラに設定情報を送信する機能以外は、ISO11783で可変散布などに用いる通信機能をそのまま使用しており、CANバス上で市販VTと共存しても動作している。
成果の活用面・留意点
- 本機で、ISOBUS対応作業機を制御するには、当該作業機に必要となる制御情報を作業機側から共通リモートコントローラに送信する機能を付加する必要がある。
- 試作播種機用ECUでは、施用量設定のほか、施用量のキャリブレーションに利用できる。
- 本機の開発には、中央農研開発のNARO CAN BOARDを用い、北農研開発のISO11783ソフトウエアライブラリを使用した。
具体的データ
その他
- 中課題名:土地利用型大規模経営に向けた農作業ロボット体系の開発
- 中課題整理番号:160a0
- 予算区分:交付金、実用技術
- 研究期間:2011~2015年度
- 研究担当者:奥野林太郎、西脇健太郎、元林浩太、寺元郁博、濱田安之(農業情報設計社)
- 発表論文等:
1)奥野ら(2014)職務作成プログラム「共通リモートコントローラソフトウエア」、機構-K13
2)奥野ら(2014) 職務作成プログラム「ブロードキャスター用ECUソフトウエア」、機構-K12
3)奥野ら(2014) 職務作成プログラム「ロボット用操出制御型作業機ECUソフトウエア」、機構-K06