ポイント
- イチゴの栽培ベッドが移動する装置との組合せにより定置型を実現
- 定置型にすることにより収穫ロボットの低コスト化を実現
- 遮光により、昼間でも果実の判別が可能となり、稼働時間の拡大を達成
概要
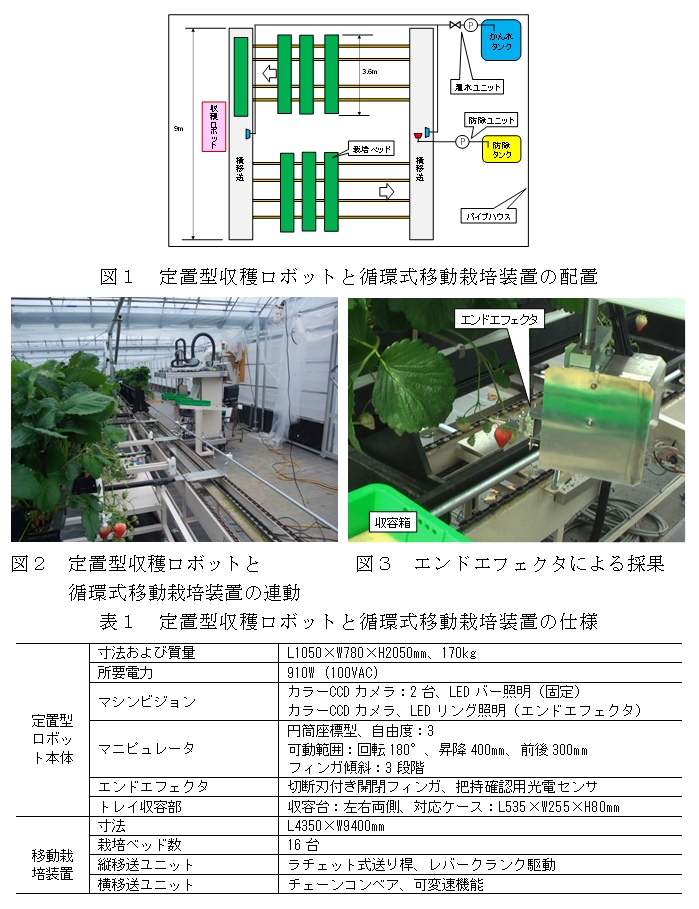
農研機構 生研センターでは、イチゴの全労働時間の1/4程度を占め規模拡大の隘路になっている収穫作業について、その自動化に取り組み、移動型のイチゴ収穫ロボットの開発を進めてきました。その知見を活かし、この度イチゴの栽培ベッドが循環移動する装置(以下、循環式移動栽培装置)に対応して、定位置で自動収穫を行う定置型イチゴ収穫ロボットを開発しました。
循環式移動栽培装置と組み合わせたロボットシステムは、画像処理で横移動中の栽培ベッドから赤色果実を探索して栽培ベッドを停止させ、収穫適期の果実のみを摘み取ります。周囲が明るすぎると判別精度が下がるため、移動型では昼間の収穫は困難でしたが、定置型では遮光が可能であることから、果実周辺の遮光により昼間の収穫が可能となりました。ロボットは赤く熟した果実のうち4~7割の果実を収穫して、作業の省力化とロボットの稼働時間の拡大を達成しました。
本技術の実用化によってイチゴの収穫作業を省力化できることに加え、循環式移動栽培装置との組み合わせにより、定植から栽培管理、防除、収穫作業がシステム化され、イチゴの大規模生産技術の構築に寄与します。
本装置は、今後現地実証試験を経て平成26年度からの販売を目指します。
関連情報
予算:運営費交付金
参画企業:シブヤ精機株式会社、愛媛県農林水産研究所
特許:特願2004-222864、2012-042499、2010-260547、2010-260548、2010-260549