ポイント
- イチゴ選果施設において平詰めソフトパックにパック詰めするロボットです。
- 軟弱な果実を傷つけないように果底部(ヘタ)を吸着して搬送します。
- 従来の手作業によるパック詰め時間を大幅に短縮できます。
概要
農研機構生研センターとヤンマーグリーンシステム株式会社は、農業機械等緊急開発事業(以下、緊プロ事業)において、イチゴの選果施設を対象としたパック詰めロボットを開発しました。
パック詰めロボットは、イチゴの選果ラインの最終工程に設置され、果実を傷つけない特殊な方法でハンドリングします。最大で6個の果実を同時に扱えることにより、慣行手作業よりも40%程度省力的にパック詰めすることができます。
これまではパック詰め作業がボトルネックとなって選果施設の処理能力が制限され、生産者が収穫物を選果施設に全量出荷できないという状況が生じることもありました。本装置により選果施設の処理能力が拡大されることで、イチゴ生産者がパック詰め作業から完全に解放され、よりきめ細かい栽培管理や規模の拡大が可能となり産地の活性化が期待されます。
今回開発した「イチゴパック詰めロボット」は、ヤンマーグリーンシステム株式会社より、平成27年4月から市販される予定です。
関連情報
予算:運営費交付金
特許:出願中(2件)特願2012-64432、特願2014-030879
詳細情報
背景と経緯
イチゴの年間労働時間は約2,000時間/10aと非常に長く、選別出荷作業がその約3割を占めており、最盛期には夜なべでパック詰め作業を行わなければならないなど、重い労働負担が問題となっています。そのような中、近年選別出荷作業の分業化が進み、農協が請け負うパッケージセンターが増加傾向にあります。これにより生産者の負担は軽減しましたが、12月から6月頃までの期間雇用で熟練者を確保しなければならないことや、人件費がかさむことなどが課題となっています。また、パック詰め作業がボトルネックとなり、選果施設の処理能力が制限され、生産者が収穫物を選果施設に全量出荷できないという状況が生じることもありました。
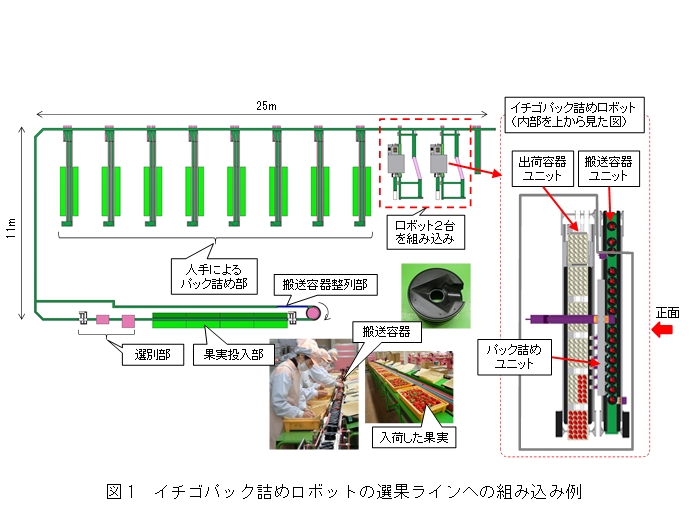
農研機構生研センターとヤンマーグリーンシステム株式会社は、こうした選果施設の状況を改善し、生産者の負担を軽減するため、緊プロ事業として、人力より高能率にイチゴをパック詰めするロボットの開発を進めてきました。選果ラインではイチゴが、1個ずつ搬送容器(図1)に載せられ等階級に選別されてパック詰め部に供給されます。パック詰めロボットは、人手によるパック詰め部の一部に組み込んで使用することを想定しています。本開発では増加傾向にある傷のつきにくい平詰めソフトパックを対象として、慣行の手作業を上回る能率でかつ果実を傷つけずにパック詰めすることを目標としました。なおパック詰めした果実の姿勢を手直しする必要がある場合も想定されますので、その目標割合は1割未満としました。
開発機の概要および性能
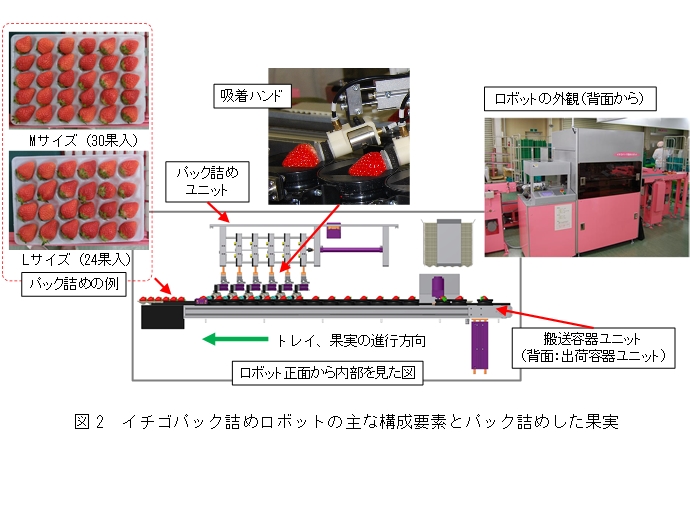
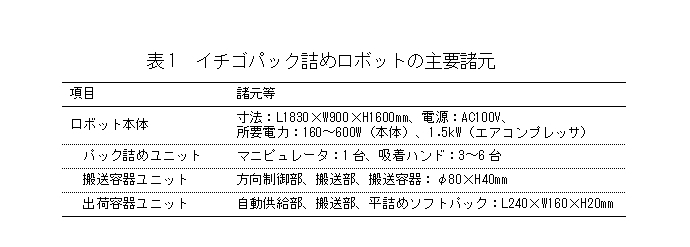
- 本装置は、イチゴの選果ラインに組み込まれ、別途選別された果実を平詰めソフトパックに詰めるロボットであり、「パック詰めユニット」、「搬送容器ユニット」、「出荷容器ユニット」で構成されています(図1、表1)。対応する平詰めソフトパックの規格は、5×6果の30果入(Mサイズ用)、4×6果の24果入(Lサイズ用)、4×5果の20果入(2Lサイズ用)の3種類です。
- 搬送容器ユニットは、搬送容器の方向を揃え、設定した個数の搬送容器を順次パック詰めユニットに供給し、その後、空になった搬送容器を選果ラインに排出します。
- パック詰めユニットは複数の吸着ハンドを備え、1回の動作(所要時間:約9秒)で複数のイチゴ果実(最大で6個)を同時に搬送容器からイチゴを吸い上げ平詰めソフトパックに詰めます。果実と接触する吸着ハンドの先端部分には食品衛生法に適合したスポンジを使用し、さらに果底部の形状や果実姿勢のばらつきに対応して吸着ハンド先端の向きが柔軟に変化する構造を有しています。質量9~20 g(M~2Lサイズに相当)の果実のパック詰めが可能です(図2)。
- 出荷容器ユニットは、平詰めソフトパックを50枚以上ストックし、自動でパック詰めユニットに供給します。不足した場合は警報により周囲の作業者に知らせます。
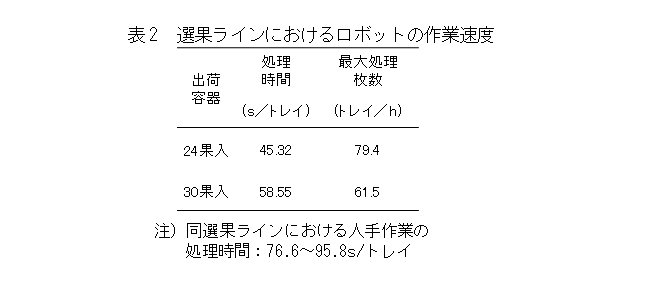
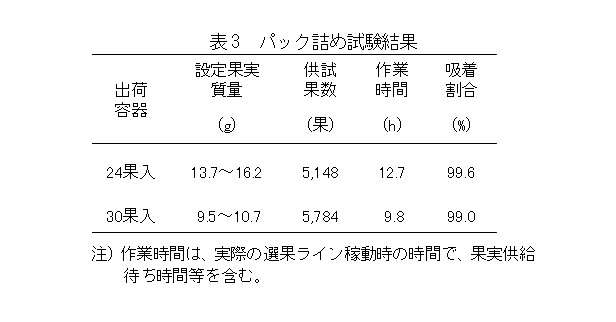
- 作業速度は、人手作業でソフトパック1枚(トレイ)当たり77~96秒に対して、開発機では45~59秒であり(表2)、40%程度省力化できます。また、搬送容器から果実を吸着して出荷容器まで搬送する吸着割合は99%以上を確保しています(表3)。
- 吸着ハンドにより把持した果底部に吸着痕などの損傷は認められませんでした。
- 自動でパック詰めした果実を出荷時に検品する際、作業者が果実の姿勢を手直しする作業が必要となる場合がありました。搬送容器上の果実姿勢が適正であった場合、手直し割合は、Mサイズで11.1%、Lサイズで6.9%、2Lサイズで2.5%となり概ね目標を達成しました。
今後の予定・期待
今後、イチゴ選果施設での本格稼働に向け、市販化の準備を進めています。
用語の解説
平詰めソフトパック : 凹みがある発泡ポリエチレン製の出荷容器です。スーパーなどで見かけるイチゴのパックは2段詰めが主流ですが、ケーキ屋など業務用に出荷されるイチゴパックには傷のつきにくい平詰めソフトパックが利用され増加傾向にあります。今後は、スーパーなどの一般流通に広がると考えられます。