ポイント
- トラクターのステアリングを自動制御し、高精度な直線走行を実現する自動操舵システムを開発しました。
- 本装置を既存のトラクターに設置することで、播種、畝(うね)立て、マルチ敷設などの難しい作業が、非熟練者でも楽々簡単に行えます。
- 独自開発の画像処理技術により、従来品の1/2以下となる大幅な低価格化を達成しました。
概要
農研機構と三菱マヒンドラ農機(株)は、トラクターの直線作業をアシストする装置を共同で開発しました。
播種、畝(うね)立て、マルチ敷設などの作業では、行程を直線的かつ前行程と一定間隔を保つなど、オペレータには高度なトラクター運転技術が要求されます。これに対して開発した装置を、トラクターに設置することにより、ステアリングを自動制御して、目標地点や前行程の作業跡、マーカー跡などに対し、高精度かつ直線的な走行を実現します。高齢化や離農などによってトラクターの熟練オペレータが不足する中、本装置の導入により、非熟練者でも高精度な作業を簡単にできるようになります。
本装置は、トラクターのキャビン内に取り付けたカメラによる前方の風景と地面の画像から、独自の画像処理技術により直線作業に必要な情報を抽出します。従来品では使用していた高精度GPSが不要となった結果、従来品の1/2以下となる大幅な低価格化を達成しました。平成29年度下期から販売開始を予定しています。
関連情報
| 予算 | : | 運営費交付金 |
| 農業機械等緊急開発事業 | ||
| 特許 | : | 特許出願済み |
詳細情報
開発の背景と経緯
大豆や野菜類など畝立て栽培を行う作物では、播種、畝立て、マルチ敷設などの作業において、行程を直線的かつ前行程と一定間隔を保つことが、その後の中耕除草などの作業効率や生育管理の面から重要であり、トラクターのオペレータには高度なトラクター運転技術が要求されます。一方、近年は農業従事者の高齢化や離農などによって、熟練オペレータは不足する状況にあり、規模の拡大や農業の継続において、オペレータの安定的な確保が課題となっています。また、農繁期における長時間労働の傾向に対し、農作業事故防止の観点から、オペレータの負担軽減も望まれています。
そこで農研機構では、平成12年度から自動車の運転支援システム用として実用化されたステレオカメラ※1をトラクター用に改造し、トラクターのステアリングを自動制御する研究を行いました。平成20年度から、より安価な単眼カメラ※2を使った装置の研究に取り組み、ステレオカメラと同等以上の精度で、地面の凹凸を3次元的に検出する独自の画像処理手法を開発し、特許を取得しました。平成24年度からは、三菱マヒンドラ農機(株)と共同で開発を進め、生産者の畑でダイズの播種作業やサツマイモ栽培用の畝立てマルチ作業などに適用する実証試験を行い、装置の実用化の目処を得ました。単眼カメラを使ってトラクターのステアリングを自動制御する装置の実用化は、世界初となる見込みです。
内容
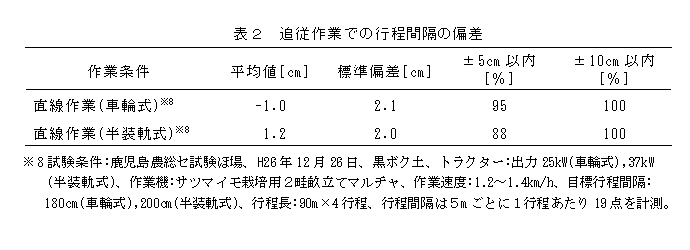
- 既存のキャビン付トラクター※3に画像装置と自動操舵装置を後付け装着する構成です。画像装置は単眼式のカメラと小型計算機が一体化した市販機器に、独自開発のアルゴリズム※4を組み込んだもので、キャビン内の上部に前方を向けて取り付けられます。自動操舵装置はメーターパネルのバイザー※5上に固定され、操作レバーに内蔵された小型モーターで駆動されるローラーによって、ステアリングホイールを外周から回転させる構造です(写真1、表1)。
- 画像装置のカメラは、トラクター前方の風景と地面を撮像します。小型計算機はその画像を処理し、トラクターの前方10m付近の地面の凹凸形状を算出します。続いて、地面の凹凸形状から、前行程の作業跡やV字形のマーカー跡の位置を検出します。また、トラクターの正面方向の遠方風景の画像を記憶し、この画像を追跡することで、トラクターの横方向のずれを検出します。
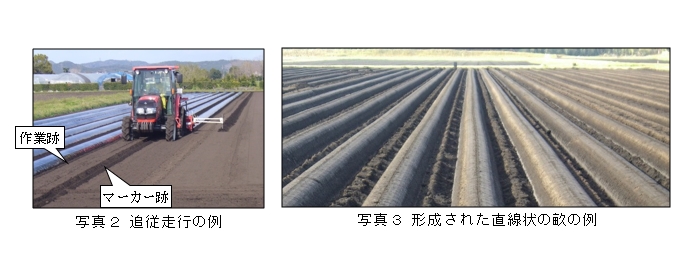
- トラクターによる作業の1行程目では、畑の遠方側の目標地点の風景を画像装置に記憶させ、この画像を追跡することで、目標地点に向けた直進走行を自動制御します。続いて、2行程目以降は、前行程の作業跡やマーカー跡の位置に対して、トラクターが一定の間隔を保って走行する追従走行※6を自動制御します(写真2)。
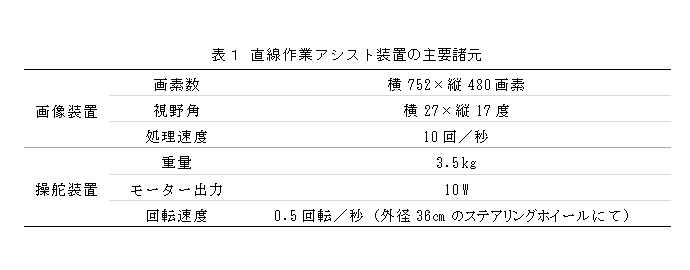
- 開発機による作業軌跡の精度は、行程の80%以上で±5cm以内となり、熟練オペレータと同レベルの精度が得られます (写真3、表2)。
- 直進走行や追従走行などの機能は、操作スイッチのダイヤルで選択でき、手動で操作レバーを動かすことで、自動操舵と手動操舵が切替えられます (写真1)。また、カメラの画像や動作状態は、ユーザーが所有するスマートフォン※7で見ることができます。
今後の予定・期待
開発機は、平成29年度下期から販売開始される予定です。現在、北海道では高精度GPSを使った自動操舵システムの普及が拡大していますが、本州以南では普及が進まない状況にあります。この要因として、本州以南で中心となっている30~50馬力のトラクターの価格に比較して、GPS式の自動操舵システムが割高な状況も一因であると考えられます。開発機の販売価格は、従来品の1/2以下となり、30~50馬力のトラクターの本体価格の10%程度となる見込みです。
用語の解説
※1 ステレオカメラ:
左右2台のカメラをフレームで連結した構造で、対象物との距離情報を、三角測量の原理で算出できる特徴を持っています。
※2 単眼カメラ :
一般的な1台のカメラのことで、ステレオカメラと区別するために単眼カメラと表記しています。
※3 キャビン付トラクター :
適応するトラクターはカメラを風雨などから保護するために、キャビン付トラクターに搭載することを前提としています。
※4 独自開発のアルゴリズム :
トラクターの走行と共に連続的に撮像される複数の画像に対して、地表面上に設定した複数の小領域の相対的な位置の変化を精密に解析することで、地表面の3次元情報を算出する手法を開発しました。
※5 バイザー :
トラクターのメーターパネルの上側の覆いを指しています。
※6 追従走行 :
前行程の作業跡やマーカー跡に対して、横方向に一定の間隔を保って走行することを指しています。マーカー跡に対しては、トラクターがマーカー跡の真上を走行するように自動制御します。作業跡に対しては、自動操舵を開始した時の間隔を保持するように自動制御します。
※7 スマートフォン :
スマートフォンの機種はAndroid4.2以降とWindows8に対応しています。スマートフォンはカメラ画像の表示に加え、画面のタッチ操作によって、画像装置に記憶させる目標地点の位置を左右に微調整する機能と、作業跡やマーカー跡に追従走行する際のトラクターとの左右の間隔を微調整することができます。