ポイント
農研機構は、イチゴの生育診断や収量予測に必要な生長点1)の画像を株ごとに記録するため、作物列の上方からドローンのダウンウォッシュ2)を加えながら移動撮影する観測技術を開発しました。本成果により、温室内の多数の株の葉の発生や生長といった情報を省力的に取得できるようになり、イチゴの高効率生産に寄与することが期待されます。
概要
そこで農研機構では、ドローンを温室内で活用することを想定し、イチゴ作物列上を飛行させて、飛行時に生じるダウンウォッシュによる下方への空気の流れで群落をかき分け、生長点を露出させながら移動撮影し、撮影した映像を用いて、株ごとの画像を記録する観測技術を開発しました。
本成果により多数の株の個体識別が可能となり、株ごとに若葉の発生やその後の生長を省力的に時系列観察できるようになります(図1)。現在、本技術で記録される画像を用いた生育診断や収量予測の自動化システムの開発を進めており、イチゴの栽培管理、環境制御、労務・出荷計画等の生産の効率化に資することが期待されます。
本成果については、7月24日~26日に開催される「施設園芸・植物工場展(GPEC)」のU-22ブースに出展します。興味を持たれた方はぜひお立ち寄りください。

関連情報
共同研究(岡山大学(研究担当者:准教授 難波和彦氏))
特許 : 特許7498955(特開2022-068003)
同 知能化農機研究領域 グループ長 深津 時広
開発の社会的背景
日本のイチゴは高品質で海外需要が高く、輸出拡大のために、新規参入も含めた生産基盤の強化が求められています。しかし、国内のイチゴ生産は温室を利用した促成栽培が主流で、冬季の暖房費に多くのコストがかかります。また、他の施設野菜に比べて栽培管理や収穫に多くの人手がかかり、労働時間も1人当たり年間2,000時間/10a程度を要しています。賃金の上昇や燃料代の高騰が進む中で経営を維持するには、生産をより効率化して単位面積当たりの生産性を向上させることが必要です。そのためには、作物の生育データに基づいて環境制御、管理作業や労務・出荷計画を最適化することが有効です。しかし、高齢化による労働力不足もあり、生産現場では、作物の生育データを人手を割いて詳細に計測する余裕はありません。このような社会的背景から、誰もが効率的にイチゴ生産を行うことをサポートするため、省力的な作物の観測技術の開発が求められています。
研究の経緯
農研機構ではこれまでに、若葉の発生頻度や、若葉の葉位別の大きさの時系列変化値などが、イチゴ促成栽培の生育を診断する指標として有効であることを明らかにしました。また、温室内での位置の違いによる差や苗そのものの個体差が大きいため、温室内のできる限り多数の株を観察対象とすることが生産の効率化に有効であることを確認しています(坪田ら、2020)。しかし、若葉が発生する生長点は葉で覆い隠されていることが多いため、そのままでは画像計測が困難であり、また、温室内では屋外のように衛星測位で位置情報を取得できないため、各株の植え付け位置を識別して時系列で比較できる新たな技術が必要でした。これらの課題を解決するため、非GNSSドローン5)の利用を想定し、作物上方からダウンウォッシュを加えて生長点を露出させることが可能な気流条件を明らかにするとともに、作物列に沿って移動撮影した映像から株の個体識別を行う画像処理手法の開発に取り組みました。
研究の内容・意義
1.ドローンのダウンウォッシュを用いた生長点付近の撮影手法
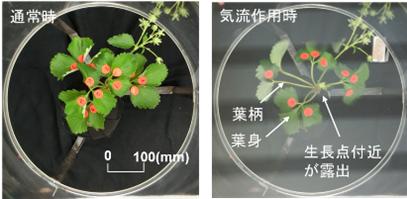
イチゴの株は、上端に生長点を有するクラウン6)を中心に、葉が螺旋状に重なりながら展開しています。このため、上方から気流を加えることで生長点を中心に葉が外側に倒れ、生長点を露出させられることを確認しました。風速と葉の動きの関係を定量的に評価したところ、風速4~6 m/s程度で葉が外側に30mm程度動き、生長点の付近に茎葉がない間隙の割合が60%程度まで向上し、発生する若葉が撮影可能となります(図2)。一方で、強い気流を加えることにより株が損傷する懸念があったため、イチゴの葉の抗力係数7)やヤング率8)等の物理特性も調べ、一般的なイチゴ株では、風速10 m/s程度までであれば損傷が生じないことがわかりました。これらの結果から、株の上方から下降気流を加えて、株を損傷させずに生長点を撮影できることが示されました。
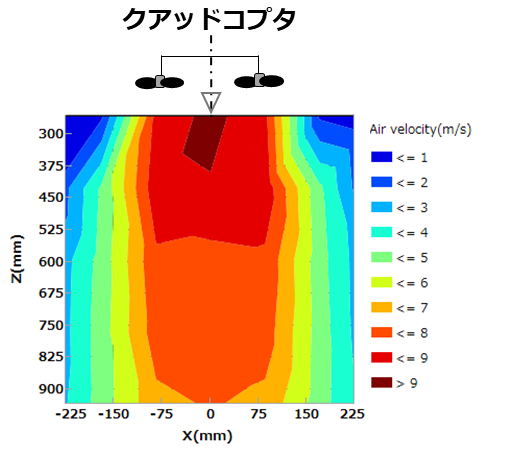
また、一般的な小型ドローン(クアッドコプタ;四枚羽根)のホバリング9)時の気流分布を調べたところ、気流は4つのプロペラの中央付近に集約しており、距離に比例して風速が減衰することがわかりました(図3)。このため、機体中央が作物列の直上(生長点の直上)になるように飛行し、高度によって株に加える気流速をコントロールすることでドローンによる観測が可能であると判断しました。
2.移動撮影で得られた映像を用いた株の個体識別
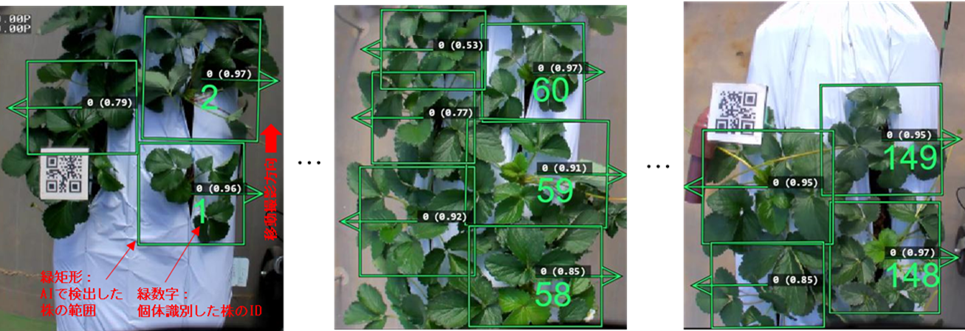
イチゴ作物列内の株ごとの画像を記録する画像処理手法を開発しました(図4)
。開発手法では、作物列上を移動しながら撮影した映像中に、順々に映り込んだ株をAIで検出してカウントすることで、作物列内の株を個体識別し、IDを付与した株ごとの画像を記録します。AIで100%の精度で株を検出することが困難な場合は、概ね一定間隔で植え付けられる株間の長さや、直線的に植え付けられる作物列の特徴を活かして、検出できなかった株の場所の推定も可能です。複数の作物列に対しても、例えば作物列の端に一つのマーカを設置しておくことで、「作物列1-株1」のように対応付けて画像を記録でき、温室内全ての株についてID付画像を記録することもできます。これにより、図1のように同一株を時系列で記録した画像を比較することで、促成栽培イチゴの重要な生育指標である若葉の発生頻度などを省力的に観察することが可能となりました。
今後の予定・期待
今回開発したイチゴの株単位の生長点画像の記録技術を用いて、同一株を時系列で記録した画像を比較することで、促成栽培イチゴの重要な生育指標である若葉の発生頻度や葉位別の大きさを省力的に観察することが可能となりました。
現在、本技術をキーテクノロジーとして、国立研究開発法人情報通信研究機構(NICT(エヌアイシーティー))の委託研究(23301)において課題名「ドローンによるダウンウォッシュを活用したスマートイチゴ栽培管理手法(2023~2025年度)」の開発・実証に取り組んでいます。「目視観察よりも高精度かつ省力的に行える生育診断システムの自動化」に加え、「非GNSSドローンによる温室内自動航行による移動撮影の自動化」を目指しています。生育診断の完全自動化により、経験に左右されることなく誰もが効率的なイチゴ生産を行うことができるようになります。
本技術については、7月24日~26日に開催される「施設園芸・植物工場展(GPEC)」のU-22ブースに出展します。興味を持たれた方はぜひお立ち寄りください。
用語の解説
- 生長点
- 根や茎の先端にある細胞分裂が行われる部分。ここでは茎(クラウン)の先端のこと。
- ダウンウォッシュ
- 揚力が生成される過程において発生する気流の方向の変化。一般にドローンではプロペラの回転によって下方への空気の流れが生じます。
- 葉位(ようい)
- 着葉の順位のことであり、イチゴでは若い葉から順位付けされます。
- 促成栽培
- 通常よりも早い時期に収穫を可能とする栽培方法。イチゴでは国内の作付けの9割が促成栽培であり、9月頃に温室内に苗を定植して環境制御を行うことで、露地栽培では5月頃からの収穫となるのに対し、11月頃から翌年5月頃まで収穫することができます。
- 非GNSSドローン
- GNSS(衛星測位システム)を用いずに飛行制御を行うことができるドローンです。LiDAR(Light Detection And Ranging)やカメラなどの光学センサを用いて制御が行われます。温室内では衛星測位情報を安定して受信できないため、GNSSを用いない自律飛行制御が可能なドローンの適用を目指しています。
- クラウン
- イチゴ株の株元部分であり、茎に当たる部分です。上端に生長点があり、葉や果房が発生します。
- 抗力係数
- 抗力を流速と投影面積で除した値。ここでは、上方から気流を受けた時に葉身に加わる荷重を抗力、流速を風速、投影面積を葉面積としました。
- ヤング率
- 材料の剛性を示す指標値で単位はMPa。ここでは葉柄を上下に圧縮したときの応力とひずみの関係を調べて算出しました。
- ホバリング
- ヘリコプタなどが空中に浮遊したまま静止状態を維持する事を指します。
発表論文
促成栽培イチゴの生育診断に資する生体計測手法-若葉観測に利用可能な気流強度-、坪田将吾、難波和彦、深津時広、内藤裕貴、山田哲資、太田智彦、農業食料工学会誌 84(4) 229-237 2022年7月
促成栽培イチゴの生育診断に資する生体計測手法-生長点の露出に必要な気流条件の検討-、坪田将吾、難波和彦、深津時広、農業食料工学会誌 84(5) 321-331 2022年9月