ポイント
- 農研機構は令和6年8月1日から「コンバイン」のロボット農機検査を新たに開始します。安全性検査のロボット農機検査の対象機種として、農用トラクター(乗用型)、田植機、乾燥機(穀物用循環型)の遠隔監視装置に次いで4機種目になります。
- 自動運転中のコンバインに接近する人や障害物を非接触で検出する機能を確認するため、自動車のブレーキ評価試験でも用いられている人型の検出体を新たに加えることで、AIカメラを搭載したロボットコンバインにも対応できます。
農研機構では、農業機械や農業施設を対象にして実機を確認しながら安全性が確保されているかどうかを検査する安全性検査(任意の制度)を行っています。
この度、目視監視による運転を行うロボットコンバインについて、運転状態を表す表示器、遠隔操作装置の機能、人や障害物を検出した時の安全機能などの要件、試験方法を定めたロボット・自動化農機検査の主要な実施方法及び基準を策定し、令和6年8月1日から「コンバイン」のロボット農機検査を新たに開始します。
引き続き、ロボット・自動化農機の安全性検査を通じて、直進や旋回の自動操舵運転やロボットトラクターなどの無人運転に対応した先進的な機械が現場で安心して導入・活用されるように努めてまいります。
この度、目視監視による運転を行うロボットコンバインについて、運転状態を表す表示器、遠隔操作装置の機能、人や障害物を検出した時の安全機能などの要件、試験方法を定めたロボット・自動化農機検査の主要な実施方法及び基準を策定し、令和6年8月1日から「コンバイン」のロボット農機検査を新たに開始します。
引き続き、ロボット・自動化農機の安全性検査を通じて、直進や旋回の自動操舵運転やロボットトラクターなどの無人運転に対応した先進的な機械が現場で安心して導入・活用されるように努めてまいります。
問い合わせ先
研究推進責任者 :
農研機構農業機械研究部門 所長 長﨑 裕司
研究担当者 :
同 安全検査部 部長 志藤 博克
同 安全検査部 安全評価グループ グループ長補佐 紺屋 秀之
広報担当者 :
同 研究推進部 研究推進室 チーム長 藤井 桃子
概要
安全性検査は、①各種農業機械における安全装備について安全装備の確認項目及び安全性検査基準に基づいて検査する安全装備検査、②農用トラクター(乗用型)、農用運搬機(乗用型)及び座席を有するほ場内運搬機にそれぞれ装備される運転者を防護する装置を対象に、強度や安全空間が確保できるか等について検査する安全キャブ・フレーム検査、③ロボット農機や自動化農機の先進的な機械・装置の安全性について検査するロボット・自動化農機検査から構成されます。
今回、ロボット農機検査の対象機種に「コンバイン」を追加し新たに検査を開始します。策定したロボット・自動化農機検査の主要な実施方法及び基準の概要は、以下のとおりです。
今回、ロボット農機検査の対象機種に「コンバイン」を追加し新たに検査を開始します。策定したロボット・自動化農機検査の主要な実施方法及び基準の概要は、以下のとおりです。
| 1. 手動モード1)機能確認試験 | |
|---|---|
| 内容 | コンバインの自動運転2)を無効化した状態を確認することを目的とする。 |
| 試験 方法 |
・手動モード時に自動運転開始操作を行った場合のコンバインの挙動を確認する。 |
| 基準 |
・手動モード時は自動運転ができないこと。 |
| 2. 運転状態3)表示確認試験 | |
| 内容 | 表示器により使用者が運転状態を認識できるかどうかを確認することを目的とする。 |
| 試験 方法 |
・自動運転状態4)における表示器の表示状態を確認する。 ・自動運転可能状態5)における表示器の表示状態を確認する。 ・自動運転不可状態6)における表示器の表示状態を確認する。 |
| 基準 | ・適切に状態表示がなされ、使用者がコンバインの状況を容易に認識できること。 |
| 3. 人・障害物検出機能確認試験 | |
| 内容 | 自動運転中のコンバインに接近する人や障害物を非接触で検出して、そのことを周囲に警告する機能及びコンバインを自動停止させる機能を確認することを目的とする。 |
| 試験 方法 |
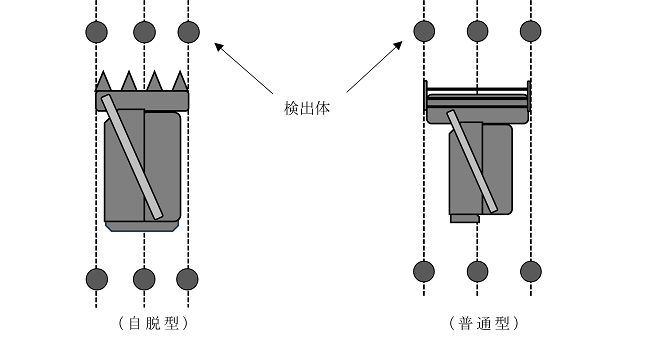
・コンバイン前・後方(図1)に検出体(図2又は図3)を設置し、コンバインを前・後進させたとき検出体が警告領域7)に入った際の挙動を確認する。 ・コンバイン前・後方に検出体を設置し、コンバインを前・後進させたとき検出体が危険領域8) に入った際の挙動を確認する。 |
| 基準 | ・検出体が警告領域に入った際は警告を発すること。 ・検出体が危険領域に入った際は、検出体との接触がないこと。また、コンバイン及び作用部は自動停止すること。 |
| 4.その他必要な安全機能確認試験 | |
| 内容 | 遠隔操作装置等の取扱性及び通信に障害が発生した場合の安全機能等を知ることを目的とする。 |
| 試験 方法 |
・自動運転を開始する操作方法について確認する。 ・自動運転状態で停止操作を行った場合の挙動を確認する。 ・自動運転状態においてコンバインと遠隔操作装置間の通信に障害が発生した場合の挙動を確認する。 ・その他安全上必要と考えられる機能について確認する。 |
| 基準 | ・遠隔操作装置には誤操作防止機能が備えられていること。 ・遠隔操作装置により停止操作を行った場合には、コンバイン及び作用部は自動停止すること。 ・コンバインと遠隔操作装置間に通信遮断等の障害が発生した場合は自動停止すること。 ・安全上必要な機能に不具合がないこと。また、発進時、自動運転に必要なシステムに障害が発生している場合は自動運転不可状態になること。 |
| 5.取扱試験 | |
| 内容 | 作業領域9)の設定等を含む一連の自動運転作業において、取扱性や安全性について確認することを目的とする。 |
| 試験 方法 |
・原則として10a以上の長方形の作業領域を設定する。 ・自動モード10)に設定したコンバインを供試し、設定した作業領域内の作業を行い、コンバインの挙動を確認する。 |
| 基準 | ・コンバインは設定した作業領域を逸脱しないこと。また、取扱性や安全性について著しい欠陥がないこと。 |
| 人・障害物検出機能確認試験(発進時)(選択試験) | |
| 内容 | 自動モードに設定したコンバインの発進時に、人や障害物を非接触で検出して、コンバインを発進させない機能を確認することを目的とする。 |
| 試験 方法 |
・自動運転可能状態で停止中のコンバインの危険領域に検出体(図2又は図3)を設置し、自動運転開始操作を行った場合の挙動を確認する。 |
| 基準 | ・危険領域に検出体が存在する際には、コンバイン及び作用部は停止していること。 |
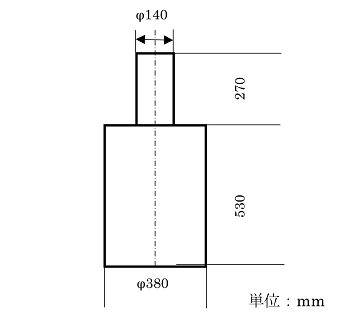
(ISO18497:201811)準拠)
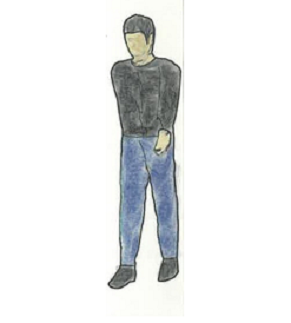
(ISO19206-2:201812)
(成人ターゲット)準拠)
用語の解説
- 手動モード
手動モードとは、コンバインの自動運転を無効化した状態をいいます。
- 自動運転
自動運転とは、GNSSやカメラ画像等の信号を利用し、自動で農作業を行うことをいいます。
- 運転状態
運転状態とは、自動運転状態、自動運転可能状態、自動運転不可状態のいずれかの状態にあることをいいます。
- 自動運転状態
自動運転状態とは、コンバインが自動運転中の状態をいいます。
- 自動運転可能状態
自動運転可能状態とは、使用者が自動運転を指示するとコンバインが自動運転を開始することができる状態をいいます。
- 自動運転不可状態
自動運転不可状態とは、使用者が自動運転を指示してもコンバインが自動運転を開始することができない状態をいいます。
- 警告領域
警告領域とは、人・障害物がコンバインの周囲にあり、人・障害物が危険領域に侵入する 可能性がある領域をいいます。
- 危険領域
危険領域とは、人・障害物がコンバインの周囲にある場合、機械や作用部の動きにより重大な事故につながる可能性がある領域をいいます。
- 作業領域
作業領域とは、ほ場内で使用者がコンバインに自動運転させる領域をいいます。
- 自動モード
自動モードとは、コンバインの自動運転を有効化した状態をいいます。
- ISO18497:2018
ロボット農機の安全性に関する国際規格
- ISO19206-2:2018
自動車のアクティブセーフティ機能の評価試験デバイスに関する国際規格