ポイント
- 農研機構は、世界に先駆けてロボット・自動化農機の安全性の確認に主眼を置いた検査方法・基準を策定し、農林水産省や農機メーカー等との協議を経て、2018年から公的制度である農業機械安全性検査として実施して参りました。このたび、このことが海外からも高く評価され、ロボット農機の安全性に関する国際規格「ISO 18497:2024」の発行に際して、農研機構が策定したロボット・自動化農機検査の主要な実施方法と基準が掲載されました。将来的に安全性が高いロボット農機の国際的な普及促進が期待されます。
今般、2018年に発行されたロボット農機の安全性に関する国際規格ISO 18497:20185)が改訂され、ISO 18497:20246)が発行されました。その検討過程において、農研機構のロボット農機の安全性検査の実績が高く評価され、ISO 18497:2024の付属文書として、農研機構が策定したロボット・自動化農機検査の主要な実施方法と基準(ロボットトラクター用、ロボット田植機用)が掲載されることとなりました。
国際的にも農業機械のロボット化は進展しており、それらの普及に当たっては安全性を担保するための検査は重要です。国際規格に掲載されることで、農研機構のロボット・自動化農機検査の方法・基準が世界中に周知されます。今後、海外の農機メーカーがロボット農機の日本向け製造・販売を検討する際に、農研機構の検査方法・基準が考慮されることや、日本の農機メーカーによるロボット農機輸出への貢献が期待されます。
社会的背景
一方、日本では2017年に農林水産省が、リスクアセスメントの実施など安全性確保の原則、関係者の役割等についての指針を示した「農業機械の自動走行に関する安全性確保ガイドライン」7)を策定したことにより、2018年からほ場での有人監視下で運用されるロボットトラクターの本格的な市販化が世界に先がけて始まりました。その際、農研機構では、農業機械の自動走行に関する安全性確保ガイドライン及びISO 18497:2018を参考に、より具体的な「ロボット・自動化農機検査の主要な実施方法及び基準」を策定し、2018年からロボットトラクター、2020年からロボット田植機の安全性を公正、中立な立場から検査・認証を行ってきました。
ISO改訂版への掲載に至った経緯
農研機構は、TC23/SC19/WG8に担当者をエキスパートとして派遣し、規格内容を協議する国内審議団体である一般社団法人日本農業機械工業会のロボット農機分科会の協力を得て、安全性の検査方法・基準の国際規格として、既に検査実績がある農研機構の「ロボット・自動化農機検査の主要な実施方法及び基準」を改訂版のISO 18497:2024に掲載することを提案しました。その後、TC23/SC19/WG8での協議において、農研機構が世界に先駆けてロボット農機の安全性確認に主眼を置いた検査を実施し、既に数多くの認証を行っているという実績が高く評価され、ロボット農機の検査方法・基準が、国際的な基準であるISO規格に掲載されることとなりました。
今後の予定・期待
農研機構は、今後も国内外の農業の発展のため、ロボット農機の安全性検査方法・基準の開発と国際標準化に取り組んで参ります。
掲載された内容
| 1. 手動モード8)機能確認試験 | |
|---|---|
| 内容 | トラクター、田植機の自動運転9)を無効化した状態を確認することを目的とする。 |
| 試験方法 | ・手動モード時に自動運転開始操作を行った場合のトラクター、田植機の挙動を確認する。 |
| 基準 | ・手動モード時は自動運転ができないこと。 |
| 2. 運転状態10)表示確認試験 | |
| 内容 | 表示器により使用者が運転状態を認識できるかどうかを確認することを目的とする。 |
| 試験方法 | ・自動運転状態11)における表示器の表示状態を確認する。 ・自動運転可能状態12)における表示器の表示状態を確認する。 ・自動運転不可状態13)における表示器の表示状態を確認する。 |
| 基準 | ・適切に状態表示がなされ、使用者がトラクター、田植機の状況を容易に認識できること。 |
| 3. 人・障害物検出機能確認試験(トラクターの必須試験、田植機の選択試験) | |
| 内容 | 自動運転中のトラクター、田植機に接近する人や障害物を非接触で検出して、そのことを周囲に警告する機能及びトラクター、田植機を自動停止させる機能を確認することを目的とする。 |
| 試験方法 | ・トラクター、田植機の前・後方(図1)に検出体(図2)を設置し、コンバインを前・後進させたとき検出体が警告領域14)に入った際の挙動を確認する。 ・トラクター、田植機の前・後方に検出体を設置し、トラクター、田植機を前・後進させたとき検出体が危険領域15) に入った際の挙動を確認する。 |
| 基準 | ・検出体が警告領域に入った際は警告を発すること。 ・検出体が危険領域に入った際は、検出体との接触がないこと。また、トラクター、田植機、作業機、植付部は自動停止すること。 |
| 4.その他必要な安全機能確認試験 | |
| 内容 | 遠隔操作装置等の取扱性及び通信に障害が発生した場合の安全機能等を知ることを目的とする。 |
| 試験方法 | ・自動運転を開始する操作方法について確認する。 ・自動運転状態で停止操作を行った場合の挙動を確認する。 ・自動運転状態においてトラクター、田植機と遠隔操作装置間の通信に障害が発生した場合の挙動を確認する。 ・その他安全上必要と考えられる機能について確認する。 |
| 基準 | ・遠隔操作装置には誤操作防止機能が備えられていること。 ・遠隔操作装置により停止操作を行った場合には、トラクター、田植機及び作用部は自動停止すること。 ・トラクター、田植機と遠隔操作装置間に通信遮断等の障害が発生した場合は自動停止すること。 ・安全上必要な機能に不具合がないこと。また、発進時、自動運転に必要なシステムに障害が発生している場合は自動運転不可状態になること。 |
| 5.ほ場外逸脱防止機能確認試験(田植機の必須試験) | |
| 内容 | ほ場外への田植機の逸脱を防止する機能が装備されていることを確認することを目的とする。 |
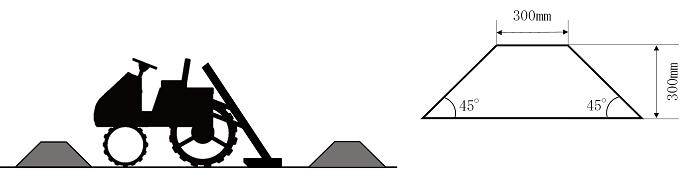
| 試験方法 | ・模擬畦畔へ向けて田植機を前後進させたとき田植機が模擬畦畔(図3)を乗り越えようとする際の挙動を確認する。 |
| 基準 | ・模擬畦畔を乗り越えようとする際は、植付部を含め田植機は自動停止すること。 |
| 6. 取扱試験 | |
| 内容 | 作業領域16)の設定等を含む一連の自動運転作業において、取扱性や安全性について確認することを目的とする。 |
| 試験方法 | ・原則として10a以上の長方形の作業領域を設定する。 ・自動モード17)に設定したトラクター、田植機を供試し、設定した作業領域内の作業を行い、トラクター、田植機の挙動を確認する。 |
| 基準 | ・トラクター、田植機は設定した作業領域を逸脱しないこと。また、取扱性や安全性について著しい欠陥がないこと。 |
| 7. 人・障害物検出機能確認試験(発進時)(トラクターの選択試験) | |
| 内容 | 自動モードに設定したトラクターの発進時に、人や障害物を非接触で検出して、トラクター、田植機を発進させない機能を確認することを目的とする。 |
| 試験方法 | ・自動運転可能状態で停止中のトラクターの危険領域(図4)に検出体(図2)を設置し、自動運転開始操作を行った場合の挙動を確認する。 |
| 基準 | ・危険領域に検出体が存在する際には、トラクター及び作業機は停止していること。 |
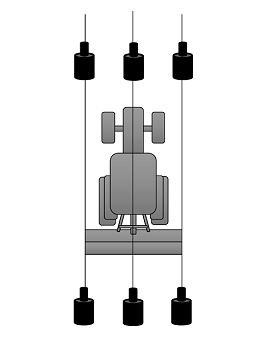
(例:トラクター)
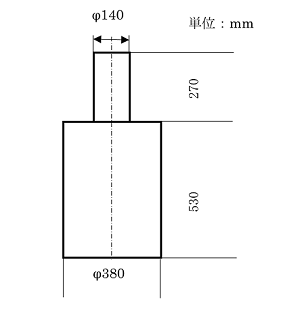
(ISO 18497:2018準拠)
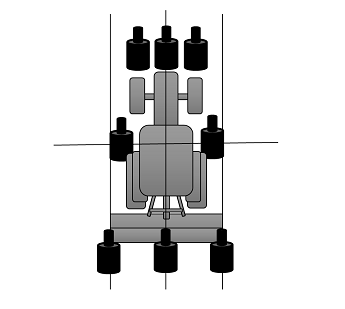
(例:トラクター)
用語の解説
- 安全性検査
安全性検査は、①各種農業機械における安全装備について安全装備の確認項目及び安全性検査基準に基づいて検査する安全装備検査、②農用トラクター(乗用型)、農用運搬機(乗用型)及び座席を有するほ場内運搬機にそれぞれ装備される運転者を防護する装置を対象に、強度や安全空間が確保できるか等について検査する安全キャブ・フレーム検査、③ロボット農機や自動化農機の先進的な機械・装置の安全性について検査するロボット・自動化農機検査から構成されます。
- ロボット農機
使用者がほ場内やほ場周辺から監視しながら、無人でほ場内を自動運転させる農業機械をいいます。
- 自動化農機
ほ場内で使用する自動操舵機能を有し、運転者の乗車を必要とする農業機械をいいます。
- ロボット・自動化農機検査
直進や枕地の自動操舵運転やロボットトラクターなどの無人運転ができる先進的な機械が現場に安心して普及していけるように、人・障害物の検出機能等について検査します。
- ISO 18497:2018
Agricultural machinery and tractors -- Safety of highly automated agricultural machines -- Principles for design「農業機械類及びトラクタ-高度に自動化された農業機械の安全-設計原則」はロボット農機を対象とした適切な安全性レベルが確保されるよう、安全要求事項、保護方策、リスク低減方策及びそれらの検証手段を規定した国際規格です。
- ISO 18497:2024
ISO 18497:2018を4つに項目分けし、(①機械設計の原則と用語、②障害物保護システムの設計原則、③自動作業領域、④検査方法と検査原則)より実用的な内容にアップデートされました。
- 農業機械の自動走行に関する安全性確保ガイドライン
農林水産省が策定した、ロボット技術を組み込んで自動的に走行又は作業を行う車両系の農業機械(ロボット農機)の安全性確保を目的として、リスクアセスメントの実施など安全性確保の原則、関係者の役割等についての指針です。専門的な用語などには解説を添付します。本文のキーワードとなる用語については、本文中に注記しておくこともわかりやすくするひとつの方法です。
- 手動モード
手動モードとは、トラクター、田植機の自動運転を無効化した状態をいいます。
- 自動運転
自動運転とは、GNSSやカメラ画像等の信号を利用し、自動で農作業を行うことをいいます。
- 運転状態
運転状態とは、自動運転状態、自動運転可能状態、自動運転不可状態のいずれかの状態にあることをいいます。
- 自動運転状態
自動運転状態とは、トラクター、田植機が自動運転中の状態をいいます。
- 自動運転可能状態
自動運転可能状態とは、使用者が自動運転を指示するとトラクター、田植機が自動運転を開始することができる状態をいいます。
- 自動運転不可状態
自動運転不可状態とは、使用者が自動運転を指示してもトラクター、田植機が自動運転を開始することができない状態をいいます。
- 警告領域
警告領域とは、人・障害物がトラクター、田植機の周囲にあり、人・障害物が危険領域に侵入する可能性がある領域をいいます。
- 危険領域
危険領域とは、人・障害物がトラクター、田植機の周囲にある場合、機械や作用部の動きにより重大な事故につながる可能性がある領域をいいます。
- 作業領域
作業領域とは、ほ場内で使用者がトラクター、田植機に自動運転させる領域をいいます。
- 17) 自動モード
自動モードとは、トラクター、田植機の自動運転を有効化した状態をいいます。