これからイチゴが旬を迎えようとしています。いや、消費量で見ればクリスマスケーキの時期から旬なのかもしれませんが、一番美味しいのは3月から4月ではないかと、個人的には思っています。昔はこの時期になると(品種はダナー等だったと思いますが)柔らかくて甘いイチゴが店頭に出回り、それをお皿に盛って潰して砂糖とミルクをかけて食べたものです。最近イチゴは生果で食べるのが普通なので、そのように改良、栽培され店頭で買ってしばらく冷蔵庫に置いておいても容易には柔らかくなりません。(イチゴミルク党にとっては柔らかさがなくなってきているのは少し残念な気もしますが、)これも各種栽培技術の向上、鮮度を長く保てる品種の育成とそれへの更新、冷蔵を含めた輸送技術の進歩等の賜であると思っております。
そのような中でもイチゴの収穫・出荷作業については、栽培期間中の労働時間の約1/4を占めており、その削減が強く求められています。収穫・出荷の際にはイチゴの果実を傷めないような技術が必要となりますが、作業者の経験と手先の器用さなどに頼ることになり、習熟度によって差が出るという課題もあります。
こういった課題を解決すべく農研機構 生物系特定産業技術研究支援センター(農業機械化促進業務)は、「定置型イチゴ収穫ロボット」を開発して、平成25年6月に研究成果として発表しており、さらに昨年平成26年11月にはイチゴの選果施設を対象としたパック詰めロボットを発表しております。
定置型イチゴ収穫ロボット
農研機構生研センターがシブヤ精機株式会社、愛媛県農林水産研究と開発したロボットです。
 |
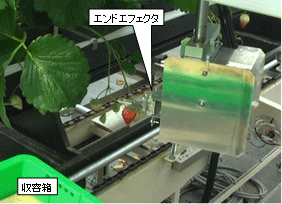 |
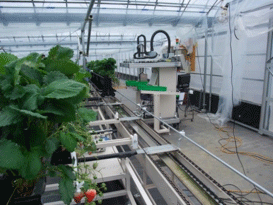
| 定置型収穫ロボットと循環式移動栽培装置の連動 | エンドエフェクタによる採果 |
このロボットは、人間の手や腕に代わって作業を実行する機械部分(マニピュレータ)、人間に代わり目視検査をするシステム(マシンビジョン)、マニピュレータの先端に取り付けて人間の指先に代わって作業を実行する機械部分(エンドエフェクタ)およびトレイ収容部から構成されます。
このロボットには採果後すぐに果実探索ができタイムロスを削減する工夫がしてあります。栽培ベッドを横に移送している間に赤色果実を探し、検出すると栽培ベッドを一時停止させエンドエフェクタ搭載カメラで着色度判定と果実の重なりの判定を行います。収穫してよいと判断すれば果柄を切断して採果を行います。果実が未熟であったり重なりがあったりすると、栽培ベッドを移送させて撮影角度を変えて再度判定し、条件を満たせば採果します。
また、「慎重モード」を選ぶと、果実の重なり判定をより厳しく行い、未熟果を誤収穫する率を低減できます。
この技術の実用化によってイチゴの収穫作業を省力化できるだけでなく、「循環式移動栽培装置」(生研センターで開発された、イチゴの栽培ベッドを循環移動させることで、慣行栽培のおよそ2倍の密植ができる装置)と組み合わせることにより、定植から栽培管理、防除、収穫作業がシステム化され、イチゴの大規模生産技術が可能となります。
この「イチゴ収穫ロボット」は平成26年4月からシブヤ精機株式会社が販売をしています。
イチゴパック詰めロボット
農研機構生研センターがヤンマーグリーンシステム株式会社とともにイチゴの選果施設を対象として開発したロボットです。
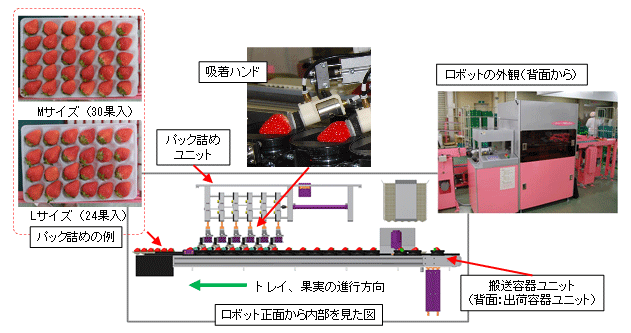 |
| イチゴパック詰めロボットの主な構成要素とパック詰めした果実 |
このロボットはイチゴの選果ラインの最終工程に設置することで、果実を傷つけない特殊な方法でハンドリングします。最大で6個の果実を同時に扱えるので、慣行手作業よりも4割程度省力的にパック詰めすることができます。
これまでは出荷作業のうち、特にパック詰め作業がボトルネックとなって選果施設の処理能力が制限され、生産者が収穫物を選果施設に全量出荷できないという状況がありました。本装置により選果施設の処理能力が拡大されることで、イチゴ生産者がパック詰め作業から完全に解放されるので、その分の労力をよりきめ細かい栽培管理をすることに充てることができます。
この「イチゴパック詰めロボット」は、ヤンマーグリーンシステム株式会社より、平成27年4月から市販される予定です。
これら収穫・出荷の労力を削減するロボットの出現によって日本におけるイチゴ等の栽培面積の規模の拡大、さらには産地全体の活性化につながることが期待されます。
近年海外でも高い評価を受けている日本のイチゴ。この先もより安く安定的に国内外に供給されることを願います。