1.利用のメリット
本技術を適用したトラクタは、自動運転により耕うんや畝立て、施肥・播種、移植作業をまっすぐ、また平行・等間隔に行うことができる。管理や収穫作業を高精度に行うことも容易で、オペレータの軽労化や複数の補助者が必要な作業の省力化にも貢献。
2.開発機の概要
- (1)畝列や作物列、作業跡などの目標の3次元位置を検出できるステレオカメラシステムSIPSと、そのSIPSからの情報に基づき自動運転が行われる車両から構成される。
- (2)本技術を適用したトラクタは、畝列などの目標物への自動追従運転が可能で、追従目標との間隔を標準偏差5cm以下で一定に保つ自動運転が行える(走行速度1m/s程度まで)。
- (3)目標となる前行程の作業跡などがない最初の行程では、遠方に設置した点滅ランプに向かって自動直進運転することが可能で、100m以上遠方のランプに向け、直進経路からの横偏差が20cm以下の直進運転ができる。
- (4)自動運転中に作業行程端や点滅ランプへの接近をSIPSが検出するとアラームを出す。
 図2 畦塗りにおける点滅ランプへの自動直進
図2 畦塗りにおける点滅ランプへの自動直進
3.活用上の留意点
SIPSの搭載場所や適用作業に応じて、SIPS組込みソフトウエアのパラメータ調整が必要である。
自動追従運転の目標は10cm程度以上の地上高や高低差を持つ必要がある。
4.共同研究実施会社
- 井関農機株式会社、富士重工業株式会社、ヤンマー農機株式会社
5.主要諸元・構造
-
- 構 造
畝列や作物列、作業跡などの各種農作業における目標の3次元位置情報を検出できるステレオカメラシステムSIPSと、そのSIPSからの情報を受信して操舵制御信号などを演算・出力するコントローラを装備した自動運転車両から構成される。
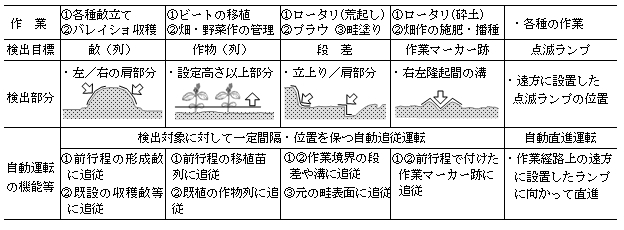
- 機能等
本技術を適用したトラクタにより、下表の作業において検出目標への自動追従運転や遠方に設置した点滅ランプに向かう自動直進運転を行うことができる。自動運転中に作業行程端や点滅ランプへの接近をSIPSが検出するとアラームを出す。
6.作業性能
-
- トラクタにおける畝列などの目標に自動追従運転する機能については、上表の検出部分の高低差が10cm程度以上ある場合に適用可能で、追従目標との間隔を標準偏差5cm以下で一定に保つ追従運転が行えた(走行速度1m/s程度まで)。
- 遠方の点滅ランプに向かって自動直進運転する機能については、ランプは100m以上遠方に設置可能で、100mの走行で直進経路からの横偏差が20cm以下の直進運転が行えた。
- (試験場所:北海道帯広市、北海道河東郡音更町、生研センター附属農場)
