1.利用のメリット
- 野菜接ぎ木ロボットに接続して使用することで、キュウリ、スイカの接ぎ木作業が1名で高能率に行える。
2.開発装置の概要
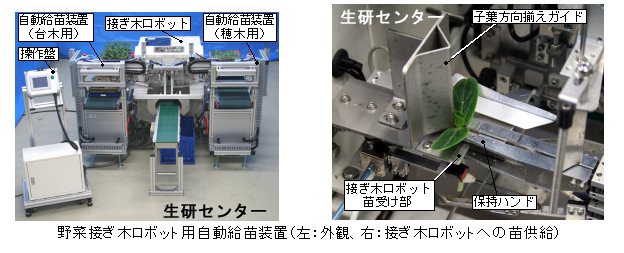
1)穂木と台木をセルトレイからそれぞれ自動的に1本ずつ取り出し、苗の高さと子葉 の向きを揃えながら野菜接ぎ木ロボット(半自動接ぎ木装置)へ供給する装置である。
2)欠株スキップ機能を備えているため、事前の補植作業は不要である。
3)95%以上の接合精度で、活着率も90%以上である。
4)セルトレイ補給者1名で接合作業が可能である。
5)給苗作業能率は毎時830本以上。接ぎ木を含めた作業能率は毎時810本程度(128穴セルトレイ使用時)である。
3.活用上の留意点
1)適応胚軸長は穂木40mm以上、台木45mm以上。
2)胚軸長の変動範囲が30mm以内で、曲がりが少ない苗を使用することが望ましい。
4.共同研究実施会社
井関農機株式会社
5.主要諸元・構造
- 構 造
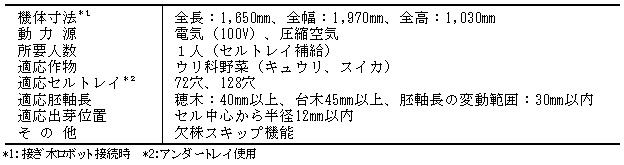
穂木用と台木用があり、いずれもセルトレイ搬送部、苗取出し搬送部、制御部に大別できる。苗取出し搬送部は、1苗を子葉展開基部で懸架するためのスリットを持つ保持ハンド、2対象とする苗のみを保持ハンドに分離・誘導するための分草桿、3セルトレイ中の苗を地際近傍で切り取るカッタ、4苗搬送スライダから構成される。苗が栽植されたセルトレイを装置に装填すると、苗取り出し、切断高さ揃え、子葉方向揃え及び接ぎ木ロボットへの苗供給が自動で行われる。
- 主要諸元
6.作業性能
- キュウリ及びスイカ接ぎ木の作業成功率は、いずれも96%であった。活着率は、接ぎ木後に接合状態の確認・手直しを行わなかった場合、スイカで95%、キュウリで92%であり、手直しをした場合は、いずれの作物でも95%を超えた。
- 給苗作業能率は穂木用、台木用とも830本/h以上、接ぎ木を含めた接合作業能率は約810本/h(128穴セルトレイ、欠株率3%程度の場合)であった。半自動接ぎ木ロボットと比較した場合、1人当たり接合作業能率は、3.1倍、接合後の挿し木までを含めた1人当たり接ぎ木作業能率は1.9倍となった。手接ぎ木(片葉切断接ぎ)との比較では、1人当たり接合作業能率は、5.4倍、1人当たり接ぎ木作業能率は3.4倍となった。
- (試験場所:愛知県農業総合試験場、長野県南信農業試験場、JAあいち経済連苗生産センター、JA全農長野野菜種苗センター、生研センター)