1.利用のメリット
画像処理装置の搭載によりイチゴの着色度を自動判別でき、収穫適期の果実のみを選択収穫するため、収穫労力が削減できる。果柄把持切断機構の搭載により、果実に触らず果柄を把持切断することで果実損傷の低減が期待できる。
2.開発機の概要
- 果実へのアプローチを通路側から行うロボットと、通路内側から行うロボット。
- 吊り下げ式の高設栽培ベッドに対応し、移動プラットフォームと組み合わせてハウス内をくまなく移動する。
- 果実の着色度(8分以上)を判別し、傷つけないように果柄を把持切断して摘み取る。
- 通路側収穫ロボットの性能は、収穫成功割合60~66%、採果処理時間9s/果で、内側収穫ロボットの性能は、収穫成功割合40%弱、採果処理時間12s/果である。
3.活用上の留意点
- 吊り下げ式のイチゴ高設栽培ベッドに対応しており、移動プラットフォームとともに利用する。また、果実の露出が多くなるように栽培管理することで、収穫成功率が向上する。
- ロボットは夜間稼働させ、ロボットが収穫できなかった果実を作業者が翌朝収穫する。
4.共同研究実施会社
エスアイ精工株式会社、株式会社前川製作所
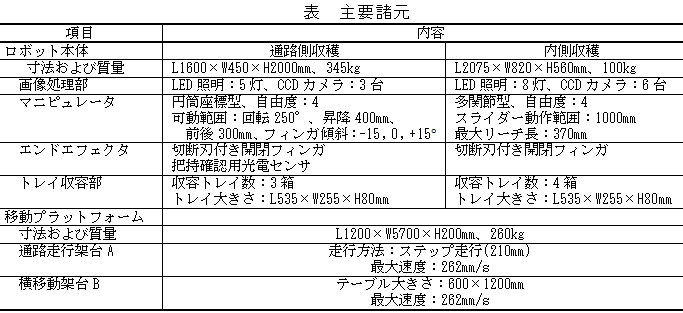
5.主要諸元・構造
果実を検出する画像処理部、人の腕に相当するマニピュレータ、果実を摘み取るエンドエフェクタ、トレイ収容部から構成される。共通の移動プラットフォームに搭載でき、通路側収穫ロボットは通路を、内側収穫ロボットは栽培ベッドの下を走行し、自動で果実を収穫する。

6.作業性能
- 開発した収穫ロボットは、画像処理により果実の着色度を判別した後、果柄を把持切断することにより果実に傷つけないよう摘み取ることができた。移動プラットフォームに搭載でき、吊り下げ式イチゴ高設栽培ハウスにおいて、自動で円滑に収穫動作を行うことが可能であった。
- 通路側収穫ロボットは、 ‘あまおとめ’、‘紅ほっぺ’を供試して性能試験を行った結果、収穫成功割合は60~66%で、果実1果あたりの採果処理時間は9秒であった。
- 内側収穫ロボットは、 ‘あまおとめ’、‘紅ほっぺ’を供試して性能試験を行った結果、収穫成功率は40%弱で、果実1果あたりの採果処理時間は12秒であった。
(試験場所:愛媛県松山市、生研センター)
