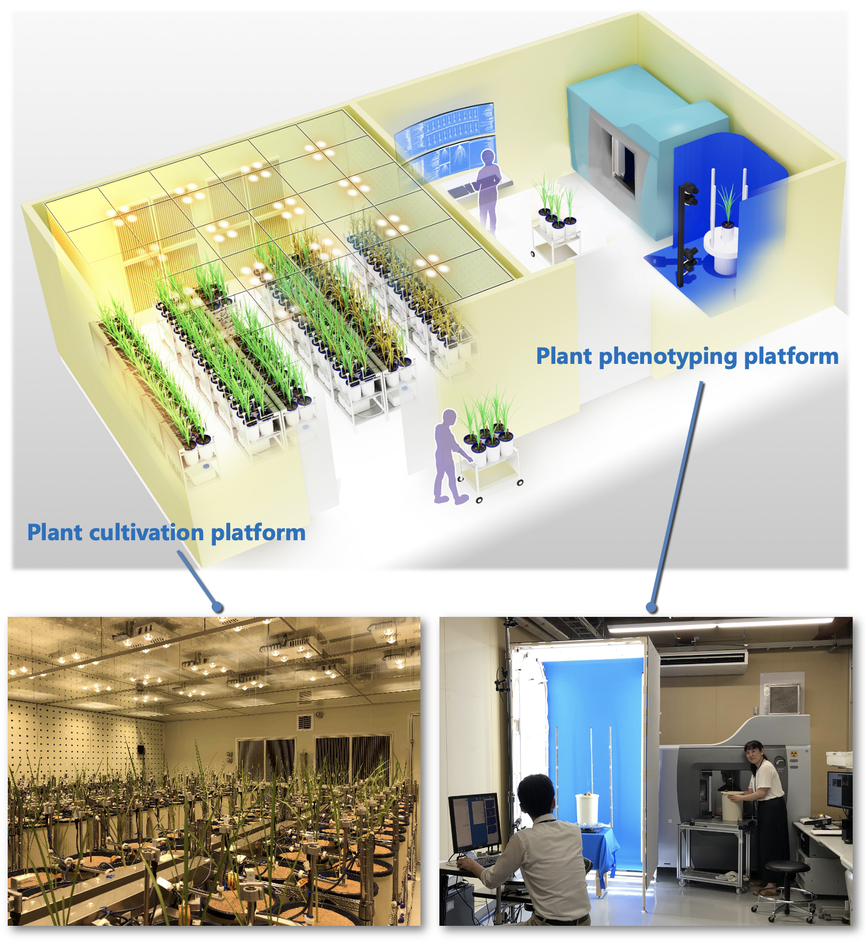

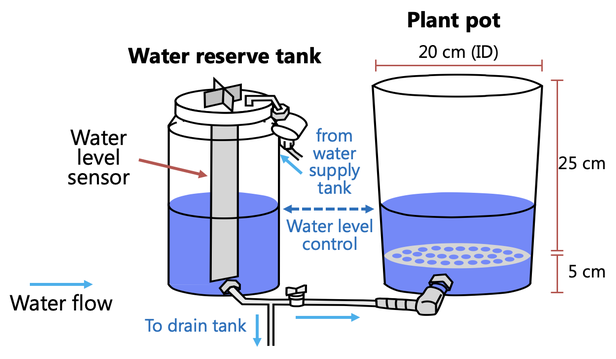
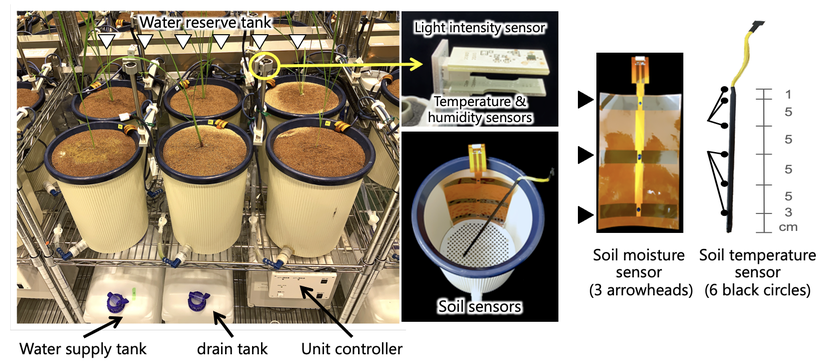
We have developed an innovative potted plant cultivation system that uses Internet of Things technology, called "iPOTs." iPOTs controls soil moisture levels in an indoor environment for plant phenotyping under varying drought conditions. The main feature of iPOTs is an automatic irrigation system that can independently control moisture levels in each pot by supplying water from the bottom of the pot (Fig. 1). This system can mimic drought conditions that occur in natural environments and monitor the temperature, humidity, illumination, and soil moisture and temperature of each pot using sensor technology (Fig. 2). iPOTs allows us to develop drought- and flood-resistant crops concurrently by reproducing drought and flooding conditions in adjacent pots.
X-ray computed tomography (X-ray CT) is widely used in industry and medicine to observe the structure of objects hidden within solid, opaque structures. Visualization of root systems of plants grown in pots has been attempted using X-ray CT, but these attempts require several hours of three-dimensional (3D) reconstruction of the root system and are not suitable for evaluating large numbers of plant samples. By optimizing the conditions for CT scanning and image processing, we have developed a non-destructive, quick, and simple technology for the 3D visualization of plant root systems in the soil.
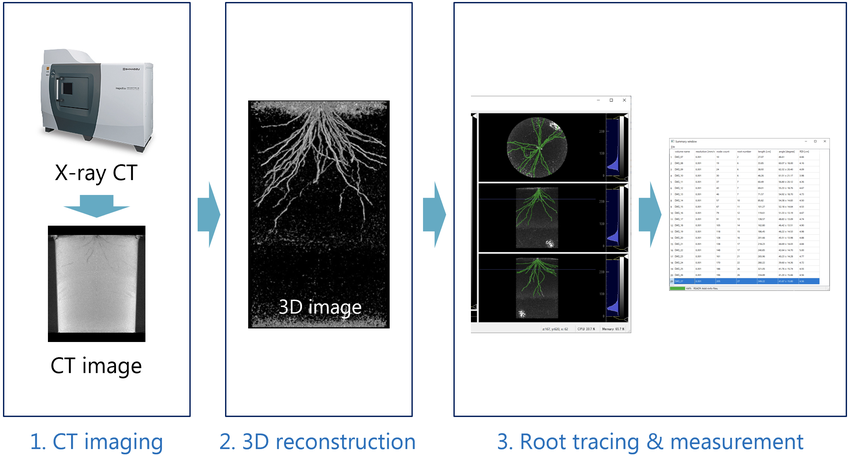
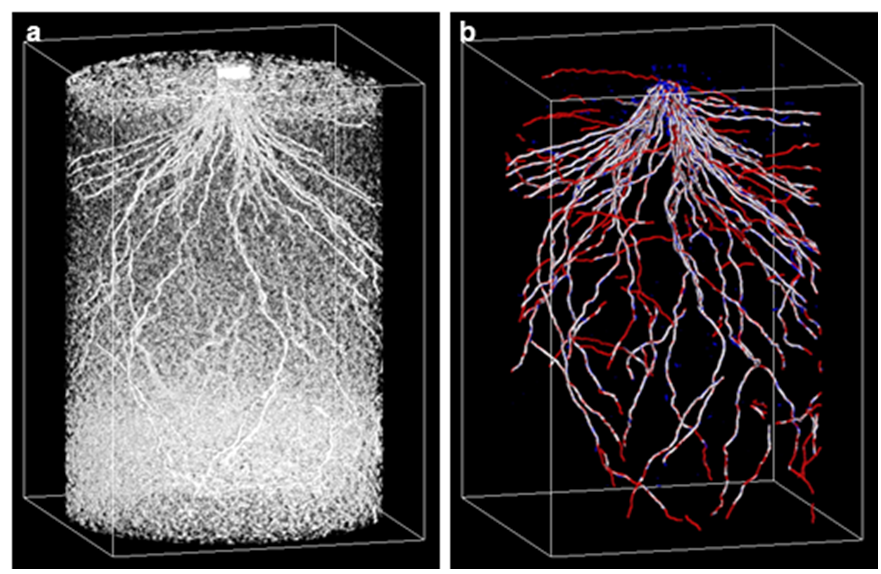
RSAvis3D is a program that easily reconstructs 3D images of the root system from multiple X-ray CT images using relatively simple image processing techniques such as 3D median filtering and edge extraction.
RSAtrace3D is a software that vectorizes root regions from 3D images of the root system obtained from X-ray CT or MRI images. This allows for automatic measurement of root length and root angle.
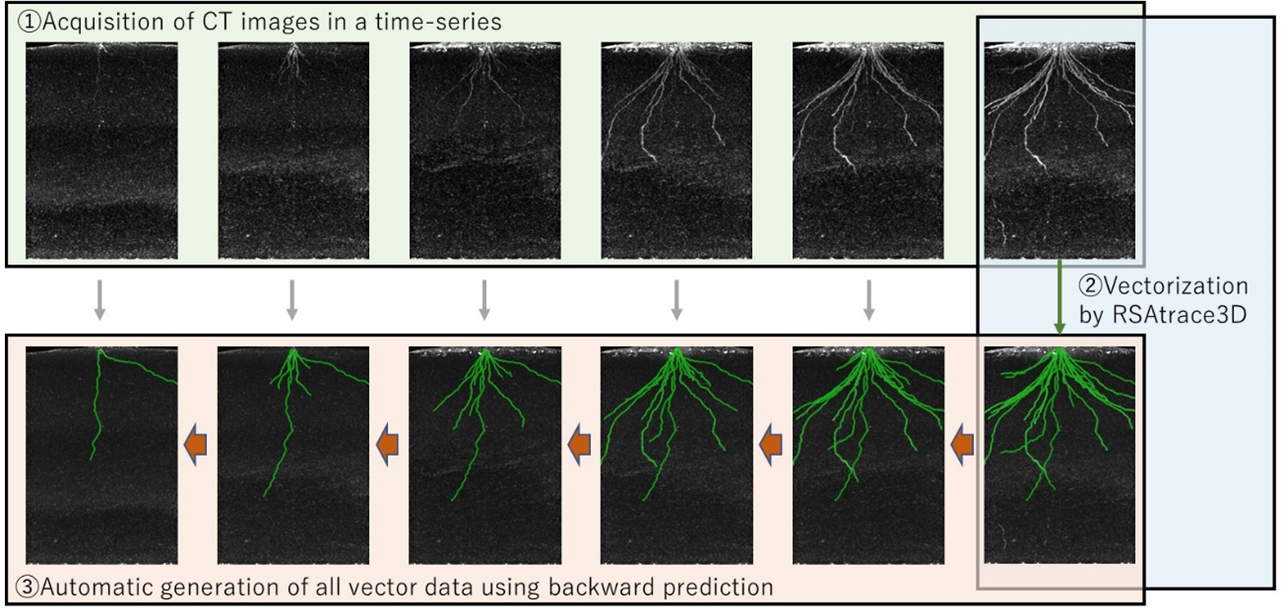
X-ray CT non-destructive imaging enables temporal measurement of plant root growth. Still, the effort for image analysis increases with the number of scans. RSAtrace4D automates part of the image analysis using a technique called backward prediction. This program allows for efficient measurement of temporal plant root growth. doi:10.1186/s13007-022-00968-x
When we capture X-ray CT images at high speeds, CT images become noisy, making subsequent image analysis difficult. We developed AI that automatically converts noisy CT images into traced images of the root system. doi:10.1186/s13007-024-01208-0
We have developed a digital camera system to acquire a 3D image of a plant's shoot architecture. Using an image analysis software based on photogrammetry technology, a 3D point cloud is produced from multiple images of a plant obtained from all directions. To do this, a potted plant is placed on a table and is photographed by running an automatic shooting program. The images are then processed by an image analysis program to automatically obtain a 3D point cloud. The image analysis program is optimized to obtain a 3D point cloud of plant-specific shapes, such as thin leaves, making it possible to obtain values for leaves of rice plants.
Collecting root samples from plants in a field requires digging and this can be laborious and time-consuming. Moreover, the size of the root sample collected using a shovel can be inaccurate. To overcome these limitations, we have developed a root collection method, which uses a cylindrical steel monolith and a backhoe. Using a backhoe to assist in driving the cylinder into the ground and retrieving it, roots can be collected with much less effort.
(Github )
Trenching is a method used to observe the root systems of plants in a field. Roots are extracted vertically using a backhoe or other equipment and the root distribution that emerges during cross section is observed. To quantify the root distribution, digital photographs of the roots in the cross section are taken, and the pixels corresponding to the roots in the photographs are extracted. However, visual extraction using image processing softwares that are currently available is labor-intensive. Therefore, we have developed a robust program using deep learning methods to extract images of roots from trench profile photographs irrespective of the soil and light conditions.
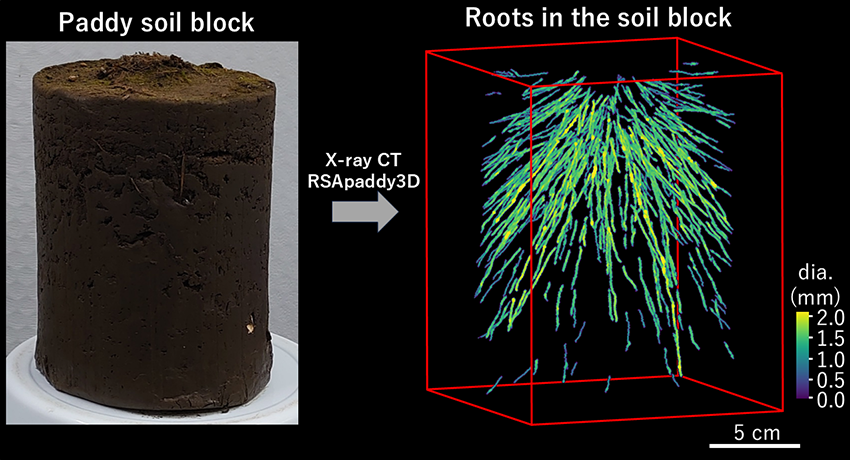
To examine the roots of rice plants in paddy soil, we typically collect the roots from the field, wash them clean of soil, and then measure them. This traditional process is very time-consuming and often takes an entire day for each rice plant. To overcome this challenge, we developed a new technology called RSApaddy 3D. This innovative approach uses X-ray computed tomography (CT) to visualize and measure the roots without the need to wash them out of the soil. With this method, we can quantify the thickness, angle, and distribution of the roots in just 10 minutes per individual plant.