土壌硬度三次元測定による圃場ムラ評価の省力・効率的手法と作物生産性評価への応用
要約
緯度・経度の自動記録と深さ85cmまで1cm刻みの土壌硬度自動測定ができるロボットを圃場全面に走行させ、土壌硬度の三次元分布データを取得する。土壌物理的な圃場ムラをマッピングする解析方法で水が溜まりやすい箇所を推定し、他の圃場データも組み合わせて的確な圃場管理を促す。
- キーワード : 土壌硬度、自動運転、マッピング、排水性、圃場ムラ
- 担当 : 農業環境研究部門・土壌環境管理研究領域・土壌資源・管理グループ
- 代表連絡先 :
- 分類 : 普及成果情報
背景・ねらい
ゲリラ豪雨や線状降水帯が毎年のように大きな被害を引き起こし、圃場では排水不良や湿害が農業生産にとって深刻な問題である。既出の研究成果(発表論文等1)参照)で、圃場内の深さ60cmまでの三次元空間において、土壌硬度三次元分布データの解析によって作物の湿害を推測できるようになり、圃場内の土壌物理性の空間的なばらつき(ムラ)を簡便に評価する手法が有用であることが証明された。次の課題として、土壌硬度三次元分布に関するデータ収集の効率化・省力化、また、解析方法の高度化が求められている。そこで、本研究では、作業の効率化・省力化のために自動測定ロボットの開発に取り組むとともに、土壌硬度三次元分布以外の圃場データも組み合わせて、圃場管理に効果的な解析方法を提示する。
成果の内容・特徴
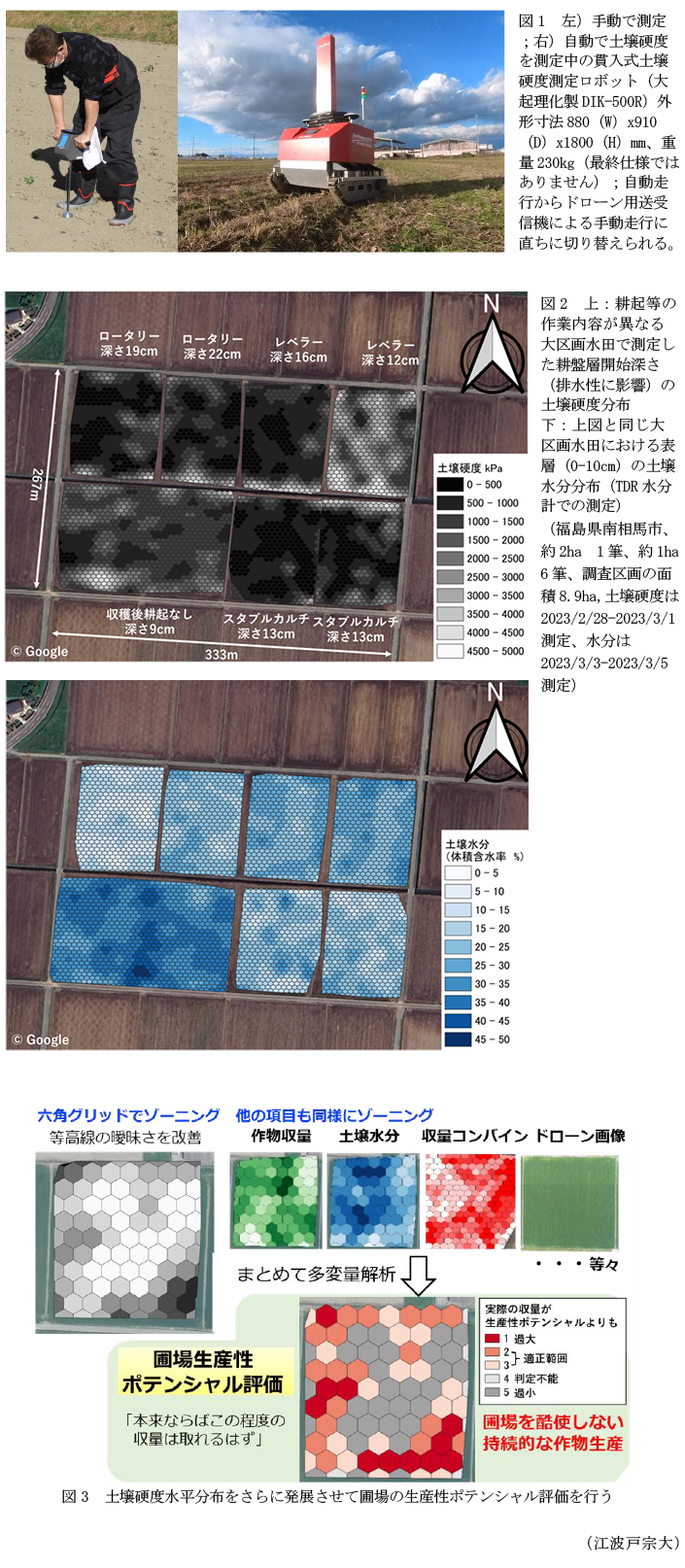
- 貫入式土壌硬度測定ロボット(図1)は、2つのGNSSアンテナによって移動方向と距離を把握しながら圃場内の位置を誤差20cm以内で精度良く稼働し、緯度経度を記録しながら、1cm刻みで深さ85cmまでの土壌硬度を自動測定する。貫入が自動なので、測定値は作業者によって変化することがなく、再現性が高い。クローラーにより悪路走破性は高く、1地点の測定にかかる時間は2分~4分程度である。外部入力により、測定するメッシュの大きさや数を圃場の大きさに応じて設定できる。リチウムイオンバッテリーで6時間程度稼働できる。
- 深さ1~60cmまでを圃場1haあたり60点程度(10mメッシュ程度)で測定して、同じ深さごとに土壌硬度の水平分布図を作成すると(図2上)、CT SCAN様の図が60枚作成できる。圃場内および圃場間の土壌物理性のばらつきが把握でき、畦を挟んでいても圃場の下では、土壌硬度のムラが隣接した圃場と繋がっている状況が確認できる。
- TDRで表層(0-10cm)の土壌水分を測定すると(図2下)「収穫後耕起なし 深さ9cm」と「レベラー 深さ12cm」で水分が高い傾向にあり、耕盤層開始位置で水を通しにくくなっていると考えられる。土壌硬度のばらつきから圃場内で水が溜まりやすい箇所を推定できる。土壌には水を加えると軟らかくなる性質があり、周囲と比較して土壌硬度が低い地点は水分含量が高い傾向にある。
- 土壌硬度以外に土壌水分や収量コンバインによるメッシュ状の収量データ、ドローン画像を土壌硬度と同様に六角グリッドで処理し、多変量解析すると、「本来ならば収穫できるはず」の収量よりも実際に多いか少ないかを評価できる圃場生産性ポテンシャルマップが作成でき(図3)、土壌の健全性を考慮した圃場を酷使しない持続的な作物生産に向けた圃場管理を促せる。
普及のための参考情報
- 普及対象 : 大規模生産者、コンサル事業者、普及指導機関。
- 普及予定地域・普及予定面積・普及台数等 : 水田や水田転換畑(ムギ・ダイズ・トウモロコシ・ソバ・野菜・果樹)等の排水性が気になる圃場、基盤整備前の調査、排水性を考慮した合筆や暗渠・明渠の施工。1筆ずつではなく、ブロックごとの圃場管理。
- その他 : 手動式の貫入式土壌硬度計(DIK-5532)でも同様の評価が可能である。
具体的データ
その他
- 予算区分 : 交付金、農林水産省/F-REI(大規模水田営農)、文部科学省(科研費)、BRIDGE、民間資金等(資金提供型共同研究)
- 研究期間 : 2018~2024年度
- 研究担当者 : 江波戸宗大、藤村恵人、久保堅司、齋藤稔(大起理化)、諏佐友哉(大起理化)、齋藤智則(大起理化)、大石正行(大起理化)
- 発表論文等 :
- 農研機構(2018)「土壌物理性簡易診断として圃場全面深さ60cmまでの土壌硬度を三次元分布で評価する」(研究成果情報)
- 江波戸(2021)土壌の物理性、149:23-35
- 農研機構(2021)「圃場オンサイト計測による簡易な土壌物理性診断の標準作業手順書」(2021年4月26日)
- 江波戸「圃場における土壌物理性診断方法」特許第7356748号(2023年9月27日)