全方位カメラを用いたビジュアルサーボ
要約
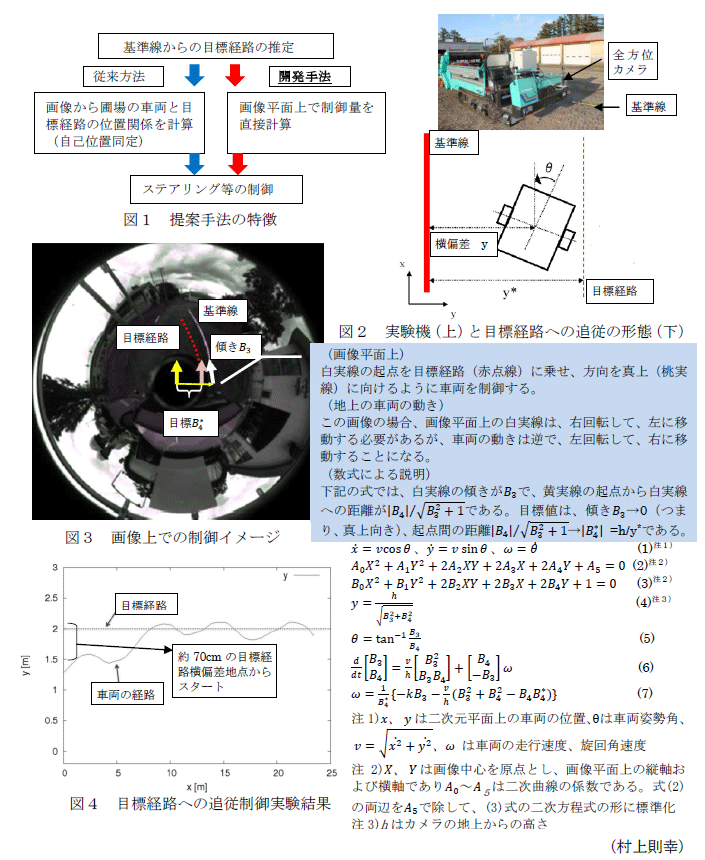
全方位カメラ画像による農業車両制御方法である。開発手法は、カメラで取得した画像平面上で直接制御を行うため、車両の自己位置同定を行う必要がない。堆肥散布機の走行制御に適用した結果、0.5m/sの走行速度にて、経路誤差20cm以内で基準線に沿って走行可能であった。
- キーワード:マシンビジョン、自動走行、自己位置同定、堆肥散布
- 担当:IT高度生産システム・大規模IT農業
- 代表連絡先:電話 011-857-9260
- 研究所名:北海道農業研究センター・水田作研究領域
- 分類:研究成果情報
背景・ねらい
作物列や圃場周辺の畦等の情報が利用できる条件での農業車両自動走行のためのセンシング手法として、マシンビジョンは有望である。特に全方位カメラはミラーに反射した画像を撮影することによって360度の画像撮影が可能で作業機周辺の広範な環境情報を得られるメリットがある。しかし、従来の方法ではミラーの歪等を補正して車両の自己位置を同定する必要がある。そこで調整の簡易な、自己位置同定を必要としない制御方法を開発する。
成果の内容・特徴
- 開発手法はXY座標の原点を全方位カメラ画像の中心として、前段の処理で抽出した圃場の基準線の横軸(Y軸)近傍の画素を2次曲線で近似し、その近似曲線のその近似曲線がY軸と交わる点の接線の傾きと画像中心までの距離を用いた制御方法である。全方位カメラのレンズの歪を補正して、車両の実測位置を同定することが不要である(図1)。
- 車両モデルの運動学モデルを(1)式で定義し、全方位カメラで直線を見た場合の画像上の二次曲線(2)式を(3)式に変形する。制御の目標は、横偏差yを一定目標値y*に、角度θを0に収束させることである(図2)。このとき、ワールド座標上における基準線から車両までの横偏差yと、車両の姿勢角θと画像平面上で定義した状態量B3、B4との間の関係(4)(5)式から(導出省略)、B3、B4を制御に関する状態量とし((6)式)、入力ωを(7)式で定義するとB3 → 0、B4 → B4*となり収束が保証される(ここでkは正のゲイン)(図3)。
- 堆肥散布機(タカキタ:SD2700)(図2)の操作用レバーを電動アクチュエータにより制御可能にした実験機を使用し、露地に設置した基準線の追従走行実験を行った結果、車両の速度を0.5m/s、制御ゲインk=0.25の設定条件では、経路誤差は20cm以内である(図4)。
- 圃場の端での旋回では、旋回部分を仮想的に曲線で補間することによって適応可能である(図表省略)。
成果の活用面・留意点
- 本手法は、全方位カメラ画像により、畦など基準線を検出し、目標経路を設定できる場合の車両走行制御に活用できる。
- 2ポンプ、2モータのHST(油圧静トランスミッション)を有する、堆肥散布機に堆肥を無積載の状態で実施した実験結果である。
具体的データ
その他
- 中課題名:IT等の利用による精密・低コスト大規模農業のための基盤技術開発及び体系化
- 中課題番号:160d0
- 予算区分:交付金
- 研究期間:2009~2012年度
- 研究担当者:村上則幸、深尾隆則(神戸大)
- 発表論文等:平松ら(2011)農機誌73(3)、191-198