トマト一段密植栽培用の着果処理ロボット
要約
トマト一段密植栽培に対応する着果処理ロボットは、夜間にトマトの花房を自動認識し、処理適期の花房のみに着果ホルモン剤を噴霧する。開花時期に複数回、走行させるが、処理済の花房位置を記憶しているので重複処理を防ぐことができる。
- キーワード:トマト、一段密植、着果処理、ロボット、開花認識
- 担当:日本型施設園芸・施設野菜生産
- 代表連絡先:電話 050-3533-3861
- 研究所名:野菜茶業研究所・野菜生産技術研究領域
- 分類:研究成果情報
背景・ねらい
トマト栽培において着果ホルモン剤は、気温や花粉稔性にかかわらず安定した効果を発揮し、果実成熟の揃いも良くなるため広く用いられている。しかし、着果ホルモン剤は生長点に付着させたり、同一花房に複数回噴霧すると生理障害を引き起こすことがあり、処理花房を判断する必要があるため手作業によって噴霧されている。この作業を自動化できれば、労働時間の削減を図ることができ、着果処理によって果房単位で果実成熟が揃えば房どり収穫による省力化も見込める。また、トマトの一段密植栽培は草姿が単純で機械化に向いていると考えられる。そこで、トマトの一段密植栽培に対応した着果処理ロボットを開発する。
成果の内容・特徴
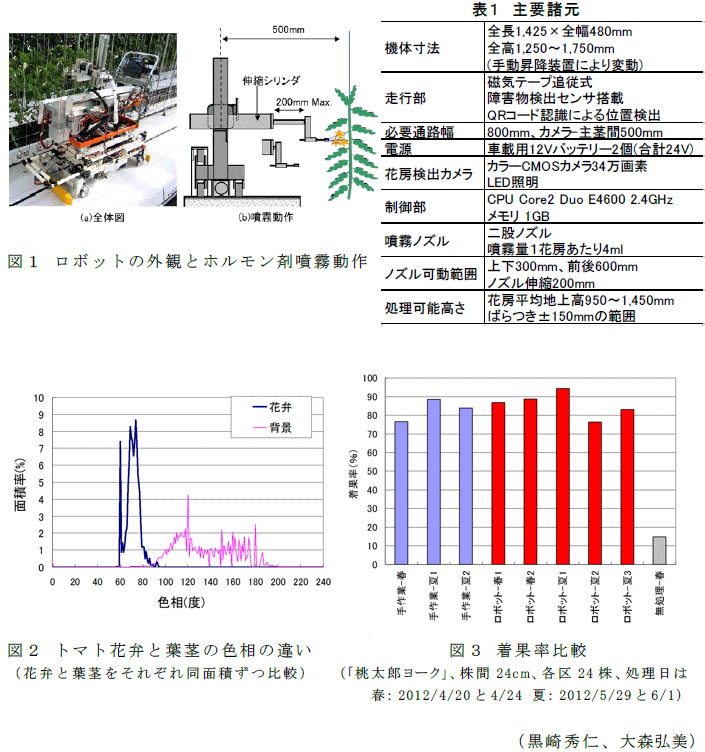
- 着果処理ロボットは、走行部と手動昇降装置、噴霧ノズル、ノズルの縦横移動および伸縮を行う3台の電動シリンダ、カメラ、LED光源、バッテリー、制御部などから構成されている(図1(a) 、表1)。ロボットは、通路に敷設した磁気テープに沿って走行する。ロボットの位置は、栽培ベッド下部に設置されたQRコードを読み取って算出する。
- トマト花弁と葉茎の色相は異なるため、ロボットのカメラで得た画像を色相に閾値を設けて分離することで、トマトの花を認識できる(図2)。また、花房の花弁面積から開花数を推定し、着果処理適期の花房を識別できる。
- ロボットは着果処理適期に達した花房を探索し、着果ホルモン剤をスポット噴霧することができる(図1(b))。一度処理した花房の位置は記憶するため、次回の走行では未処理の花房だけに着果処理を行う。
- 開花時期のばらつきに対応するため、数日の間隔をあけて複数回の処理が必要となるが、トマト品種「桃太郎ヨーク」では、開花のピークを狙えば1回目の走行で約80%、2回目の走行で残りの20%の花房を処理できる。この時、移動と着果処理を含めた1回目の処理時間は1株あたり22秒、2回目は移動と未処理花房の処理に要する時間が1株あたり8秒となる。
- ロボットと手作業による着果率では双方とも平均85%程度であり有意差はない(図3)。
成果の活用面・留意点
- 十分な認識率を得るためには、誘引作業時に花房を通路側(ロボットのカメラ側)に向ける必要がある。昼間は花房認識率が低下するため、ロボットの稼働時間は夜間限定とするが、これによって人間が作業できない時間帯を有効に活用することができる。
- 1株の処理時間を22秒とし、処理時間の10%をベッド間の移動に費やした場合、一晩に処理できる株数は最も夜が長い12月で2,000株、最も夜の短い6月で1,400株となる。
具体的データ
その他
- 中課題名:高生産性と低環境負荷を両立させる施設野菜生産技術の体系化
- 中課題整理番号:141a0
- 予算区分:交付金、委託プロ(アシスト)
- 研究期間:2007~2014年度
- 研究担当者:黒崎秀仁、大森弘美、高市益行、岩崎泰永
- 発表論文等:
1)黒崎ら(2012)農業機械学会誌、74(6):490-497
2)黒崎ら(2014)農業食料工学会誌、76(6): 541-548
3)黒崎ら「着果処理装置」特許第5652756号 (2014年11月28日)