セルトレイを100%正常苗に
(欠株・生育不良苗をロボットで良苗に交換)
- 接ぎ木ロボット精度飛躍的向上
- 機械移植で欠株なし
(1997年発表)
セルトレイを100%正常苗に
(欠株・生育不良苗をロボットで良苗に交換)
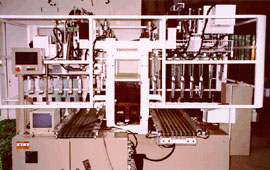
果菜類用セルトレイ苗補填装置
果菜類では、全自動接ぎ木ロボットの接ぎ木歩留まりが向上。葉菜類では、欠株のない機械移植が可能。
(試験場所:千葉県暖地園芸試験場、福岡県農業総合試験場)
 果菜類用セルトレイ苗補填装置
果菜類用セルトレイ苗補填装置
 葉菜類用セルトレイ苗補填装置
葉菜類用セルトレイ苗補填装置
 葉菜類用セルトレイ苗補填装置
葉菜類用セルトレイ苗補填装置
| 果菜類用 | 葉菜類用 | ||
|---|---|---|---|
| 1.機体の大きさ等 | 全 長 | 180cm | 166cm |
| 全 幅 | 245cm | 140cm | |
| 全 高 | 193cm | 156cm | |
| 質 量 | 800kg | 400kg | |
| 最大電力 | 550W(AC100V) | 1.5kW(AC100V) | |
| 2.対象苗 | 根鉢形成のできたトマト、なす等の苗 | 根鉢形成のできたキャベツ、レタス等の苗 | |
| 3.適応セルトレイ | 標準規格セルトレイ(128穴) その他(72穴) |
標準規格セルトレイ(128穴) | |
| 4.構 造 | 全苗をトレイから取り出し、2台のCCDカメラ等で画像処理して正常苗と不良苗を判別し、正常苗のみを別トレイに移し換える方式で、全自動接ぎ木ロボット苗用の前処理を前提とした方式 | セルトレイ上で欠株を検知し、培土を除去した後に正常苗を補填する方式で、主に葉菜類の移植を前提とした方式 | |
| 生育不良苗・欠株検出方式:全苗画像処理検出方式 | 不良苗除去・正常苗補填方式:全苗抜取り・選別・正常苗補填方式 | ||
| 生育不良苗・欠株検出方式:光電センサ検出方式 | 不良苗除去・正常苗補填方式:欠株セル内培土吸引除去・正常苗補填方式 | ||