1.利用のメリット
イチゴの選果施設で平詰めソフトパックに自動でパック詰めでき、高い処理能力を有することから選果施設の受入量増加による生産者の負担軽減と規模拡大が期待できる。
また、ヘタ部(果底部)から吸着するので、果実を損傷しない。
2.開発機の概要
- 吸着ハンドにより選果ラインの搬送容器から最大6果のイチゴ果実を同時に吸着して拾い上げ、平詰めソフトパックに向きを揃えて並べるイチゴパック詰めロボットである。
- イチゴの選果ラインに設置し、総果実質量300g以上の平詰めソフトパック(30果入、24果入、20果入の3種類)で出荷される果実を対象とする。
- 軟弱な果実を傷つけないように果底部を吸着してパック詰め作業を行う。
- 搬送容器から果実を拾い上げ平詰めソフトパックの所定位置に並べる吸着割合は99%以上である。果実が連続して供給された場合、30果入の平詰めソフトパックでは1分以内で果実を並べることができる。
3.活用上の留意点
- 対象とする果実の質量は8~20gであり、果底部の形状により吸着割合が低下する場合がある。
- 必要に応じて、ロボットによりパック詰めした果実の姿勢を作業者が手直しする。
4.共同研究実施会社
ヤンマーグリーンシステム株式会社
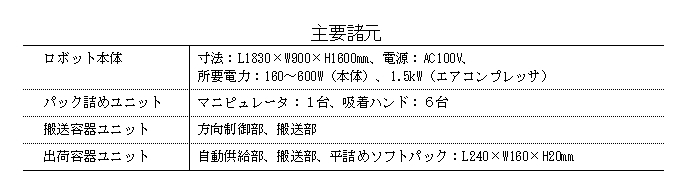
5.主要諸元・構造
イチゴパック詰めロボットは、パック詰めユニット、果実が載った搬送容器の方向を揃えて供給する搬送容器ユニット、平詰めソフトパックを自動供給する出荷容器ユニットで構成され、吸着ハンドにより選果ラインの搬送容器から最大6果のイチゴ果実を同時に吸着して拾い上げ、平詰めソフトパックに向きを揃えて並べる。イチゴの選果ラインに設置し、総果実質量300g以上の平詰めソフトパック(30果入、24果入、20果入の3種類)で出荷される果実を対象とし、軟弱な果実を傷つけないように果底部を吸着してパック詰め作業を行う。

6.作業性能
- 「さがほのか」202果を供試してロボットの基本性能を評価した結果、搬送容器上の果実姿勢及び方向が適正であった場合、吸着割合は100%であり、ロボットがパック詰めした果実の姿勢を人手で手直しする必要があると判断された割合は、Mサイズ(平均質量9.8g)で11.1%、Lサイズ(平均質量12.1g)で6.9%であった。
- 実際の選果ラインの稼働時に自動作業を行った結果、果実は平均486果/hで供給され、搬送容器から果実を拾い上げ出荷容器に搬送する吸着割合は、Mサイズ(30果入パック)で99.0%、Lサイズ(24果入パック)で99.6%であった。ロボットにより吸着して搬送する途中で果実が落下する割合は、Mサイズで0.1%、Lサイズで0.2%であった。
- 果実が連続して供給された場合、30果入の平詰めソフトパックに1分以内で果実を並べることができた。
(試験場所:佐賀県杵島郡白石町)
