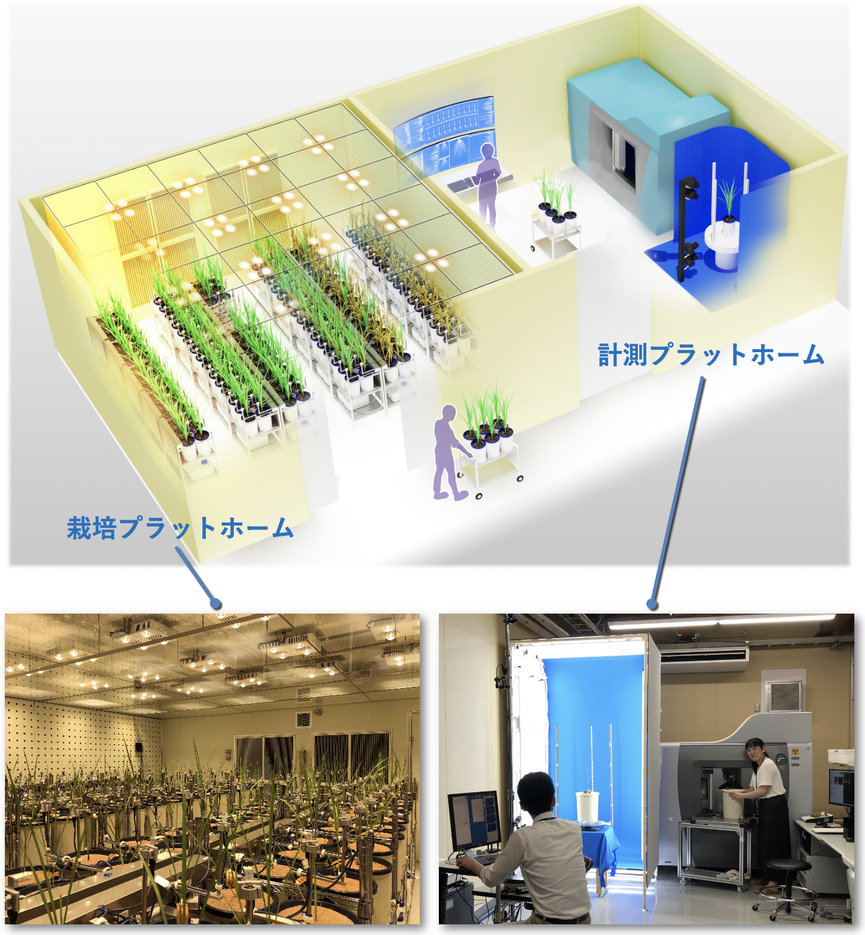

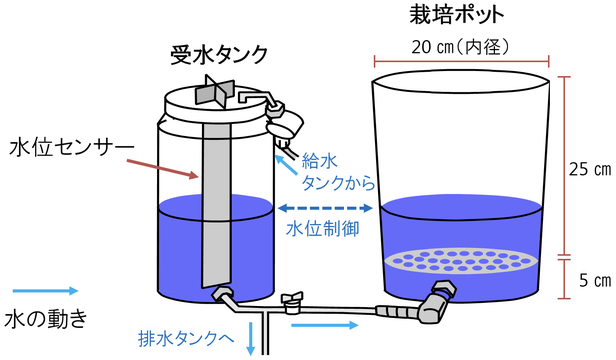
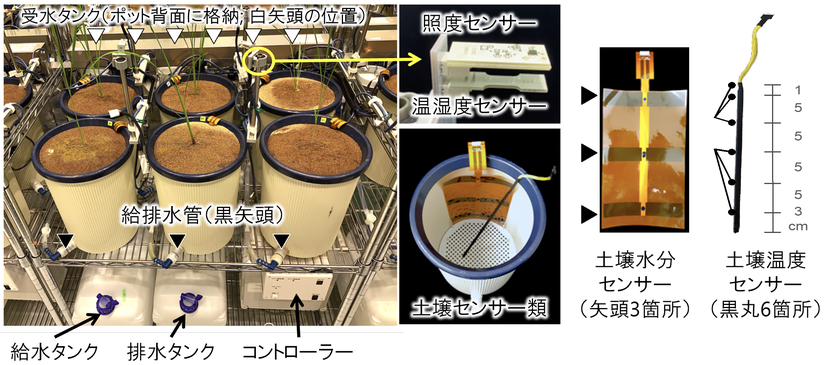
IoT技術とセンサー技術を融合させることで、屋内環境下で土壌の水環境を自動制御できるポット・システム「iPOTs(Internet of Things-based pot system controlling optional treatment of soil water condition for plant phenotyping under drought stress)」を開発しました。 iPOTsの特徴は、ポット底面からの給水により1ポットごとに土壌水分を任意に制御できる自動潅水システムです(図1)。 本システムでは自然界で起こる干ばつ状態を屋内環境にて再現でき、さらに、各ポットの温湿度、照度、土壌水分や地温の状態を常時監視できます(図2)。 本システムを用いれば、今後予想される干ばつなどの不良環境を具現化し、将来の地球環境を見越した作物開発が可能になると期待できます。
見えない物体の中の構造を観察する手法の1つに、X線断層撮影(X線CT)があり、工業・医学の分野で幅広く使用されています。
ポットで栽培した植物の土中の根についても、これまでに海外でX線CTを用いた可視化が試みられていますが、可視化に数時間かけて詳細な画像を得るという方法であり、
多数個体の調査には適していませんでした。
今回、X線CT撮影と画像処理技術の最適化を行うことにより、"土中で3次元的に生長する根の形"を非破壊・迅速・簡便に可視化する技術を開発しました。
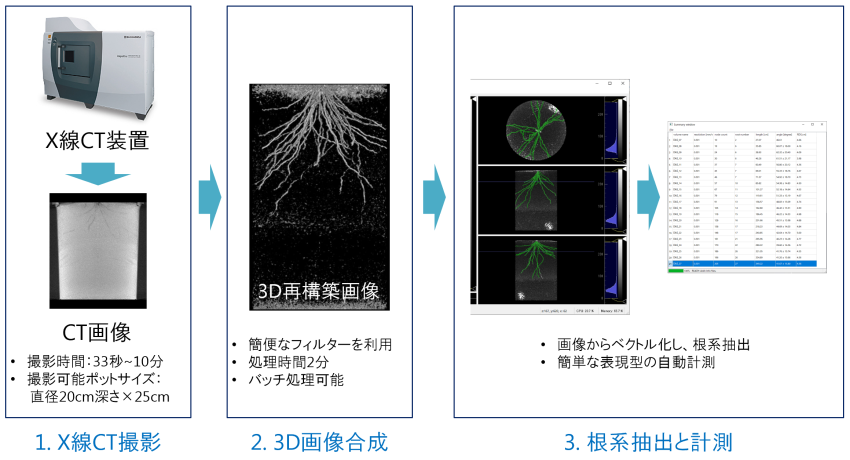
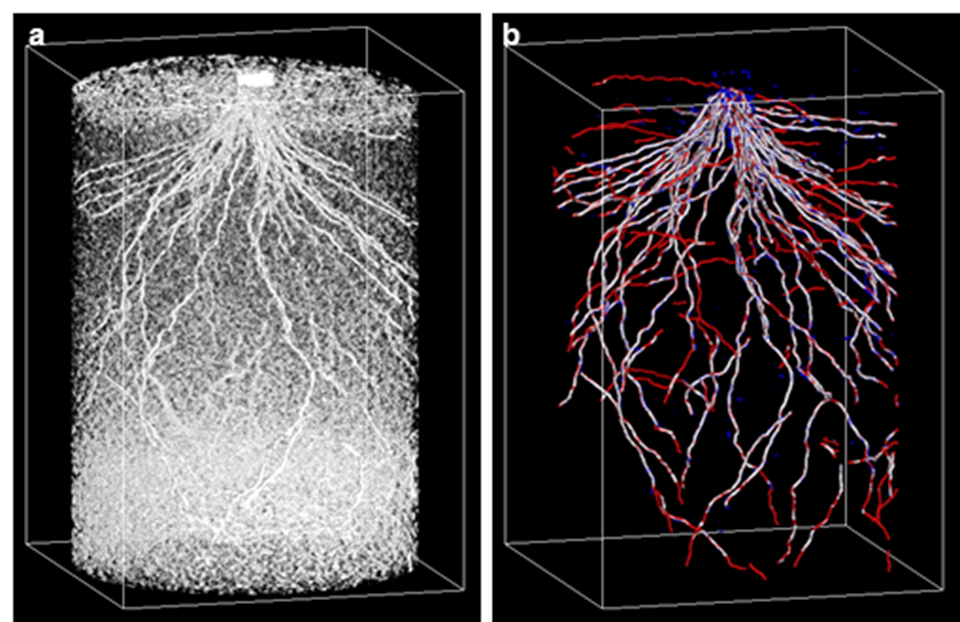
RSAvis3Dは3次元メディアンフィルターおよびエッジ抽出という比較的単純な画像処理により、大量のX線CT断層画像から根の3次元画像を簡単に再構成するプログラムです。
RSAtrace3D はX線CT画像やMRI画像等から得た土中の根の3次元合成画像から、根の領域を抽出してベクトル化するソフトウェアです。 ベクトル化することで、根長や根の角度などを自動で計測できます。
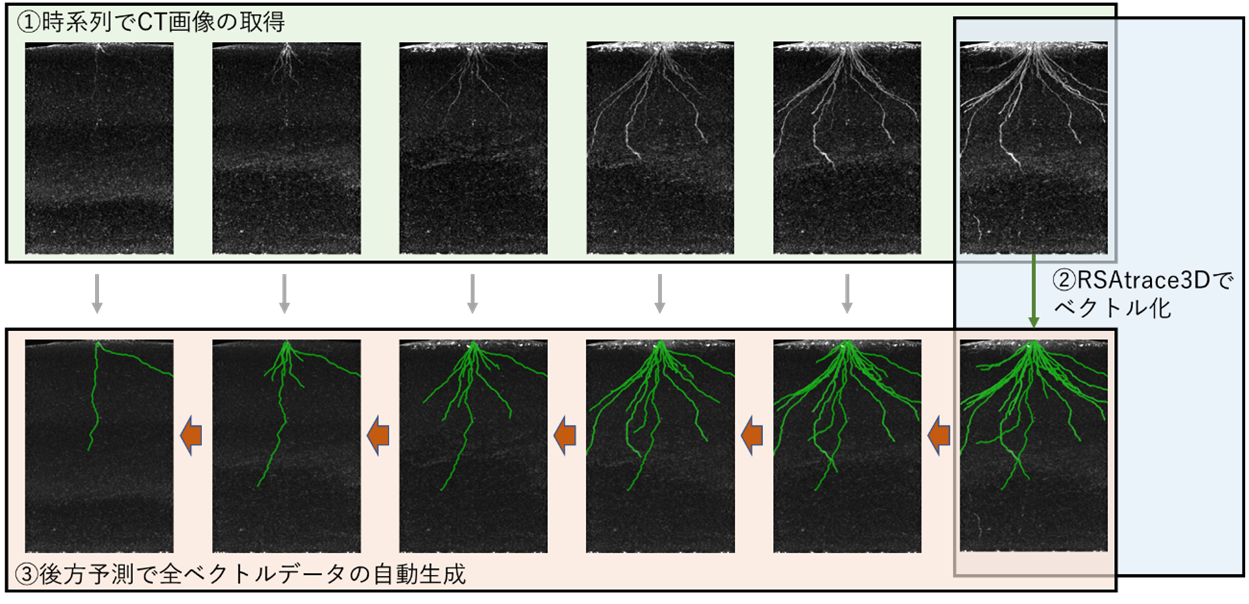
X線CTを用いた非破壊撮影は根系生長を経時的に計測できますが、撮影回数に比例して画像解析の労力が増加します。RSAtrace4Dは後方予測という技術を用いて根系トレース作業の一部を自動化し(下図3の部分)、経時的な根系生長の計測を効率的にできるプログラムです。 doi:10.1186/s13007-022-00968-x
短時間のCT撮影の場合、CT画像はノイズが増え、画像解析が難しくなります。そこで、ノイズの多いCT画像から根系のトレース画像に自動で変換するAIを構築しました。 doi:10.1186/s13007-024-01208-0
イネ地上部の3次元形状を取得するためのカメラシステムを開発しました。栽培ポットの全方位からの画像を使い、 写真測量技術を活用した画像解析ソフトウェアにより3次元点群を取得することができます。 解析に必要な画像は栽培ポットをテーブル上に置いた後に自動撮影プログラムを実行することで取得し、 取得した画像は画像解析プログラムにより自動で3次元点群が取得できます。画像解析プログラムは、 細い葉など植物固有の形状の3次元点群を求めることができるよう最適化し、イネの葉の形状値を取得することを可能にします。
畑で栽培している作物の根系を収集するには、土を掘り返す必要があります。 しかしながら、作業が重労働になりやすいこと、ショベルなどで掘り返してしまうと収集する根域サイズが不正確になるなどの問題がありました。 これらの問題を解決するため、私達は鋼鉄製の円筒モノリスとバックホーを用いた根の収集法を開発しました。 地中への円筒の打込・回収をバックホーの油圧で支援することにより低労力での根の収集を実現しました。
塹壕法とは、圃場で栽培している作物の根系形態を観察する手法のひとつです。 株際をショベルカーなどで垂直に採掘し、断面に露出させた根の分布を観察します。 分布の定量化のためには、断面の根のデジタル写真を撮り、写真上の根のピクセルを抽出する必要があります。 しかしながら、ペイントソフトを用いた目視による抽出は非常に労力がかかります。 そこで、ディープラーニングを用いた塹壕法写真からの根系抽出プログラムを作成しました。 モデル学習時にデータ拡張を行っており、土質、光条件に影響を受けにくい、堅牢な根系抽出を実現できました。
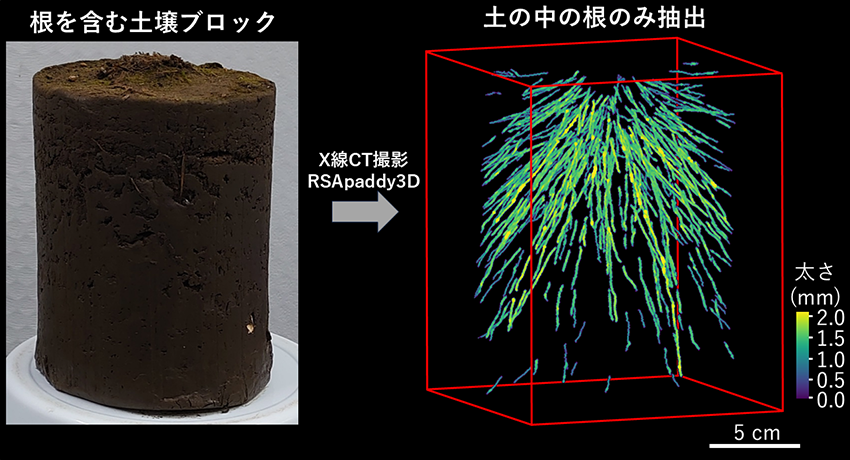
水田土中のイネの根を詳しく調べるには、水田から根を採取・洗浄後、計測する必要がありました。これら一連の作業には1個体あたり丸一日かかるなど、大きな手間と時間がかかります。そこで、X線CT(コンピューター断層撮影)を用いて、根を土から洗い出さずに可視化・計測できる技術(RSApaddy3D)を開発しました。この手法を使えば、1個体あたりわずか10分程度で根の太さや角度、広がりなどを定量することができます。