概 要
作物がほ場の中で直線的かつ等間隔に配置されていることを利用して、画像中の作物を検出する手法。従来手法と異なり、機械学習に重要な作物・雑草の形状や色などの特徴量の分布に関する事前知識や、学習用画像の確保とアノテーションを必要としない。
詳細情報
2022研究成果情報
リンク先
https://www.naro.go.jp/project/results/5th_laboratory/iam/2022/iam22_s02.html
(2022年発表)
作物がほ場の中で直線的かつ等間隔に配置されていることを利用して、画像中の作物を検出する手法。従来手法と異なり、機械学習に重要な作物・雑草の形状や色などの特徴量の分布に関する事前知識や、学習用画像の確保とアノテーションを必要としない。
2022研究成果情報
https://www.naro.go.jp/project/results/5th_laboratory/iam/2022/iam22_s02.html
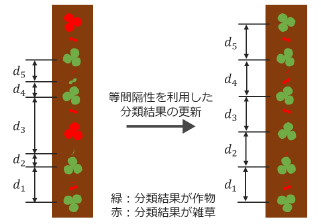
等間隔な配置を利用した画像からの作物検出手法