ポイント
農研機構は、トマトの下葉処理1)を自動で行うロボットを開発しました。下葉処理は、長段栽培2)での管理作業の中でも特に労力を要する作業であり、管理作業時間の3分の1を占めることから、収穫作業に次いで自動化が求められています。開発したロボットは、ロボットアームに装着した専用のエンドエフェクタ3)で不要な葉を自動的に刈り取ることができます。これにより、人件費や作業時間など、総コストの3割を占める労働負担の軽減が期待されます。
概要
ロボットの開発にあたり、AIによるトマト株の部位・形状を認識する画像解析手法、効率的な下葉処理を可能にする生垣用バリカンをベースとした新たなエンドエフェクタ、主茎に沿ってエンドエフェクタを動作させる制御手法など、新たな技術を開発しました。これにより、エンドエフェクタを主茎に沿って動かし連続的な下葉の切除ができるほか、エンドエフェクタにかかる反力を利用した力制御により、主茎の曲がり具合に合わせて滑らかに追従することができます。過去に開発された装置は葉を一枚ずつ検出し位置を特定して切除する方式が主流で、精度・作業時間・適用条件などに課題があり普及していませんでしたが、本技術では葉の位置を正確に特定する必要がなく、複数の葉をまとめて切除できるため、作業の高速化が可能です。
農研機構では、今回の技術を基盤に、エンドエフェクタの交換によって収穫や農薬散布など複数の機能を持つマルチユースロボットへの発展を目指しています。下葉処理と収穫を1台で対応できれば、トマト栽培の全作業時間の40%削減が見込まれ、労働力不足が深刻化する農業現場の作業効率化と生産性向上に貢献します。
本ロボットは、2025年11月26日(水)~28日(金)に東京ビッグサイトで開催される「アグリビジネス創出フェア2025」(総-28ブース)に出展予定です。会場では、装置の構造や動作のようすをご覧いただけますので、ぜひご来場ください。
ロボットによる下葉処理動作の動画がご覧いただけます。
動画のリンク https://youtu.be/varnociD_mc

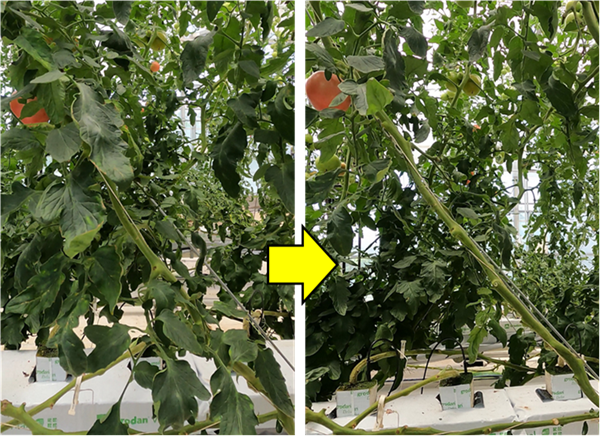
左:脇芽取り・誘引・つる下ろし、中:下葉処理(作業前と作業後)、右:収穫

関連情報
特許 : 特開2024-078291、特開2024-081238、特開2024-081954
上級研究員 黒﨑 秀仁
研究員 樫野 雅和
開発の社会的背景
近年、1ヘクタールを超える大規模温室でのトマト生産が増加しています。こうした大規模栽培では高度な設備により、収量を大きく増加できるというメリットがあります。しかし、多くの作業は手作業で行われており、農業従事者の高齢化や人件費の上昇により、今後は労働力の確保が一層難しくなることが懸念されています。そのため、人手に依存してきた作業を自動化するロボット技術の開発が急務となっています。
トマト栽培の作業自動化に関するこれまでの研究開発は収穫ロボットの実用化が中心でした。収穫ロボットはカメラで果実を検出して収穫しますが、果実が下葉で覆われていると検出が難しく、作業効率や精度が低下する課題があります。また、下葉が繁茂していると農薬散布の効果も十分に得られないなど、生育管理全体に影響を及ぼします。その一方で、手作業による下葉の処理には多大な労力がかかることから、下葉処理の自動化は重要な課題です。
研究の経緯
農研機構では、施設園芸分野におけるロボット技術の研究開発を継続的に進めてきました。①ナス自動収穫ロボット(2002年)を皮切りに、②定置型イチゴ収穫ロボット(2013年)、③トマト着果処理ロボット(2014年)、④イチゴパック詰めロボット(2013年,2014年)、⑤トマト果房収穫ロボット(2015年)、⑥着果モニタリング装置(2019年)など、多様な園芸作業の自動化技術を開発してきました。これらの研究開発を通じて、ロボットが安定して作業を行うためには、動作の障害となる下葉を適切に除去することが重要であることが明らかとなりました。この知見を踏まえ、トマト栽培の省力化をさらに進めるため、下葉処理の自動化への取組みを開始しました。
① https://www.naro.go.jp/project/results/laboratory/vegetea/2002/vegetea02-20.html
② https://www.naro.go.jp/project/results/laboratory/brain/2013/13_087.html
③ https://www.naro.go.jp/project/results/laboratory/vegetea/2014/vegetea14_s01.html
④ https://www.naro.go.jp/publicity_report/season/055918.html
⑤ https://agriknowledge.affrc.go.jp/RN/2010923046
⑥ https://www.naro.go.jp/project/results/4th_laboratory/iam/2019/iam19_s01.html
研究の内容・意義
下葉処理ロボットの研究は国内外で例が少なく、従来の方式には課題が多くありました。従来は葉を一枚ずつ認識してハサミで切るため、主茎に対して正確に葉柄を特定する必要があり、葉が密集していると視界が遮られて切除位置の認識が難しくなるほか、処理速度も遅いという問題がありました。今回開発したロボットはバリカン型のエンドエフェクタを使用し、葉柄の位置を特定する必要がなく、主茎をガイドに複数の葉をまとめて切除できるため、処理の高速化が期待できます。開発した下葉処理ロボットおよび動作手法は以下のとおりです。
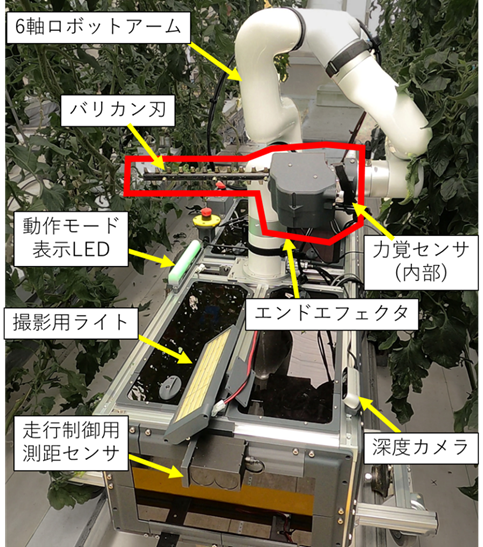
- 1. 開発したロボットは、力覚センサとバリカン型のエンドエフェクタを備えた6軸ロボットアームを使用します。植物体の認識にはロボットアーム基部に設置した深度カメラ4)を用い、下葉・主茎・果実等を識別します(図3)。
- 2. ロボットによる下葉処理動作は、主茎をガイドとしてバリカン型のエンドエフェクタを主茎に沿って動かすことで行います。主茎の形状認識には、深度カメラ画像にAIによるセグメンテーション5) と幾何学的な演算を行い、主茎の位置や方向を特定します。主茎が葉などに覆われて分断された状態で検出される場合も、演算処理で一本の連続した主茎として形状を推定することが可能です(図4)。
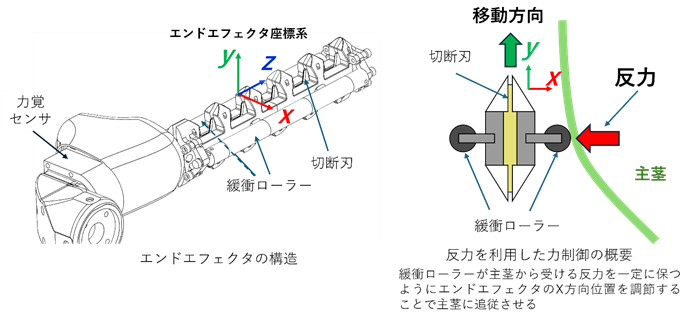
- 3. エンドエフェクタを主茎に沿って移動させ下葉の切除を行うと、主茎はエンドエフェクタから受ける力によって変形します。画像で検出した主茎の形状どおりに動かすだけでは十分な切除ができません。そこで、開発技術では、エンドエフェクタが主茎に接触する際の反力を力覚センサで検出し、ロボットアームの軌道を変更して反力を一定に保つフィードバック制御を取り入れています(図5)。これにより、形状が変化する主茎に追従しながら下葉の切除が可能となり、長段栽培特有のカーブした主茎にも対応できます。反力を利用した制御については、処理精度の向上に向けてアルゴリズムの改良を継続しています。
- 4. トマト1株の下葉の切除動作は、株の右側からエンドエフェクタを主茎に押し付けながら上下させた後、左側からも同様に行います(図6)。複数の株への作業は、作物列に沿って「移動 → 撮影 → 主茎検出 → 位置調整 → 切除」の手順を繰り返すことで連続して行うことができます。現時点での処理速度は1株あたり66秒で、下葉の約72%を切除でき、茎を誤って切断することはありません(図7)。
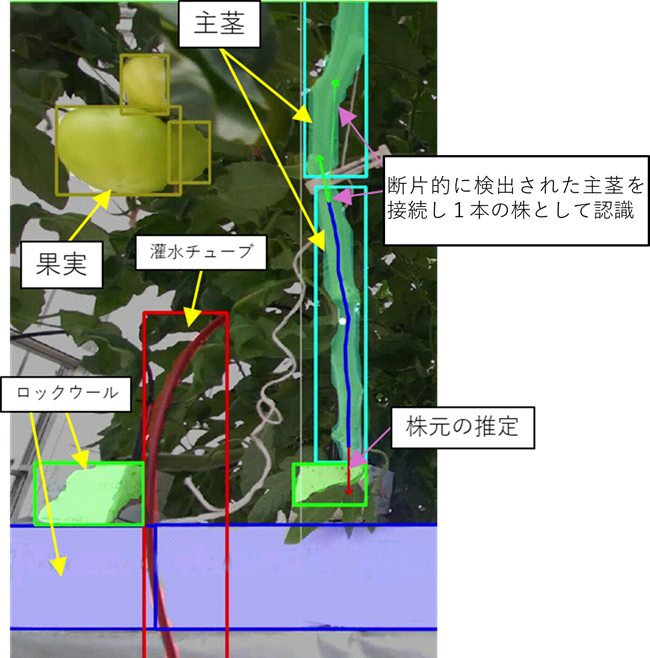
AIにより植物体や栽培ベッドの様々な部位とともに主茎を認識し、形状を推定します
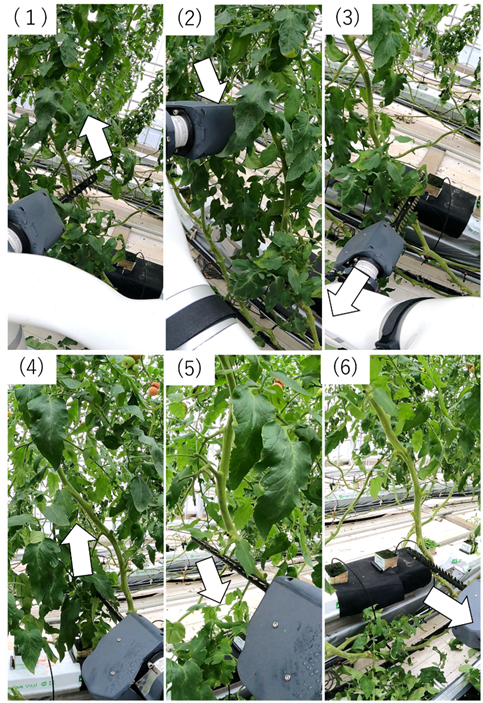
(1) 主茎の右側を下から上に刈る (2) 上から下に刈る (3) バリカンを抜く
(4) 主茎の左側を下から上に刈る (5) 上から下に刈る (6) バリカンを抜く
今後の予定・期待
本ロボットの開発により、下葉処理の自動化が可能となります。さらに、下葉を切除することで収穫など他作業の自動化も容易になることが期待されます。特に、エンドエフェクタを交換して収穫作業の自動化が実現できれば、下葉処理と収穫作業の合計でトマト栽培の全作業時間の約40%削減が見込まれます。
これまで施設園芸のロボット化には、導入コストの高さや単一機能ロボットの柔軟性不足、植物個体差への対応、主茎の誤切断による減収リスクなど多くの課題がありました。近年はAIの進化により、画像AIの主茎認識や個体差への適応が可能となり、様々な作業の自動化が現実味を帯びています。農研機構では、これらの技術をロボット開発に取り入れ、これまで解決が困難だった課題に取り組んでいます。
農研機構は、今回のロボットを起点に、ロボットアーム・深度カメラ・力覚センサなどの基盤技術を共通利用し、エンドエフェクタを交換することで複数作業に対応できる「マルチユースロボット」の開発を目指しています。この目標の実現に向け、施設園芸の自動化を共に推進するパートナーも募集しています。
本ロボットは、2025年11月26日~28日に開催される「アグリビジネス創出フェア2025」に出展予定です。興味をお持ちの方は、ぜひご来場ください。
用語の解説
- 下葉処理
- 長段栽培2)で行われるトマトの主茎下部の不要な葉を取り除く作業。成熟した果実より下の葉は日当たりが悪く光合成に貢献しないため、手作業で切除します。下葉を除去することで、収穫時に果実を見つけやすくするほか、病害虫の温床となることを防ぐ効果があります。切除した下葉は通常速やかに廃棄されますが、天敵昆虫(オンシツツヤコバチ)を利用する場合は、羽化を待つため数日間床に放置することがあります。
- 長段栽培
- トマトを約1年かけて栽培し、収穫を繰り返す手法。大規模温室では主流の栽培方法で、主茎は最終的に10m程度に達します。日当たりを良くし、常に下方で収穫作業を行うことを可能とするため、3~4mの高さに掛けたボビンに株を吊り下げ、不要な脇芽を切除しながら誘引・つる下ろし作業を行います。高所作業台車を使用するため、通路には台車の走行用レールが敷設されています。
- エンドエフェクタ
- ロボットアームの先端に取り付ける装置の総称。作業内容に応じて形状は様々で、物をつかむ場合は「ハンド」と呼ばれることもあります。
- 深度カメラ
- カラー画像と距離情報を同時に取得できるカメラ。被写体の色だけでなく、形状や距離、サイズも測定でき、ロボット等の自動認識に活用されます。
- セグメンテーション
- 画像の各画素が何を表しているかを識別する技術。従来は色や形状の特徴で識別していましたが、近年はAIを活用することで高精度な識別が可能です。
発表論文
深津ら、2023. A main stem-based operation method for a cultivation management robot system in greenhouse horticulture. Greensys2023, PS02-04.
樫野ら、2024. Force control strategy for a tomato pruning task by a manipulator equipped with a hedge trimmer, ISMAB2024, BR-R23.